-
×
 Kit Brazo Robótico 6DOF con Garra y Servos
1 × $ 1,040.00
Kit Brazo Robótico 6DOF con Garra y Servos
1 × $ 1,040.00 -
×
 Punta de Prueba SMD para Multímetro
1 × $ 64.00
Punta de Prueba SMD para Multímetro
1 × $ 64.00 -
×
 CAU-118 Punta Conica para Cautin CAU-105 y CAU-115
2 × $ 16.00
CAU-118 Punta Conica para Cautin CAU-105 y CAU-115
2 × $ 16.00 -
×
 K215 Controlador de Huellas + R503 Sensor Dactilar
1 × $ 802.00
K215 Controlador de Huellas + R503 Sensor Dactilar
1 × $ 802.00 -
×
 Raspberry Pi Pico W
1 × $ 208.00
Raspberry Pi Pico W
1 × $ 208.00 -
×
 Soldador de Gas Tipo Bolígrafo con Accesorios
1 × $ 290.00
Soldador de Gas Tipo Bolígrafo con Accesorios
1 × $ 290.00 -
×
 Módulo Zumbador Pasivo 80 dB - UNIT DevLab
1 × $ 19.00
Módulo Zumbador Pasivo 80 dB - UNIT DevLab
1 × $ 19.00 -
×
 Pasta Limpiadora para Puntas de Cautín 6g
3 × $ 34.00
Pasta Limpiadora para Puntas de Cautín 6g
3 × $ 34.00 -
×
 Plug 3.5mm TRRS Metálico
1 × $ 11.00
Plug 3.5mm TRRS Metálico
1 × $ 11.00 -
×
 Espuma Limpiadora para Equipos Electrónicos 454 ml SILIMPO
1 × $ 99.00
Espuma Limpiadora para Equipos Electrónicos 454 ml SILIMPO
1 × $ 99.00 -
×
 Kit Agujas de 0.15-0.35mm para Limpieza de Boquillas
1 × $ 72.00
Kit Agujas de 0.15-0.35mm para Limpieza de Boquillas
1 × $ 72.00 -
×
 Pelador de Cables Coaxiales Giratorio
1 × $ 35.00
Pelador de Cables Coaxiales Giratorio
1 × $ 35.00 -
×
 UNIT Kit UNO Básico con 13 practicas
1 × $ 249.00
UNIT Kit UNO Básico con 13 practicas
1 × $ 249.00 -
×
 Kit Transformador de 127V a 12VCA 1A
1 × $ 213.00
Kit Transformador de 127V a 12VCA 1A
1 × $ 213.00 -
×
 CAU-115A Cautin Tipo Lapiz de 35W 127V con Accesorios
1 × $ 159.00
CAU-115A Cautin Tipo Lapiz de 35W 127V con Accesorios
1 × $ 159.00 -
×
 CAU-170 Desoldador de Succión
1 × $ 127.00
CAU-170 Desoldador de Succión
1 × $ 127.00 -
×
 Flux Limpiador para Soldar 250 ML
1 × $ 117.00
Flux Limpiador para Soldar 250 ML
1 × $ 117.00 -
×
 DHT11 Sensor de Temperatura y Humedad KY-015
1 × $ 22.00
DHT11 Sensor de Temperatura y Humedad KY-015
1 × $ 22.00 -
×
 STM32G070KBT6 MCU Arm Cortex-M0 64MHz LQFP-32
1 × $ 46.00
STM32G070KBT6 MCU Arm Cortex-M0 64MHz LQFP-32
1 × $ 46.00 -
×
 Led RGB SMD KY-009
1 × $ 13.00
Led RGB SMD KY-009
1 × $ 13.00 -
×
 Cautín de 60W 110V con Puntas Soporte y Esponja
1 × $ 124.00
Cautín de 60W 110V con Puntas Soporte y Esponja
1 × $ 124.00 -
×
 RC522 Módulo RFID Lectura y Escritura
1 × $ 29.00
RC522 Módulo RFID Lectura y Escritura
1 × $ 29.00 -
×
 SN-03BM Prensa para Terminales ZH1.5mm SH1.0mm
1 × $ 301.00
SN-03BM Prensa para Terminales ZH1.5mm SH1.0mm
1 × $ 301.00 -
×
 NanoKVM Full IP-KVM RISC-V
1 × $ 2,379.00
NanoKVM Full IP-KVM RISC-V
1 × $ 2,379.00 -
×
 Par de Propelas 1045 Motor Brushless
1 × $ 32.00
Par de Propelas 1045 Motor Brushless
1 × $ 32.00 -
×
 Limpiador Dieléctrico para Circuitos y Tarjetas Electrónicas 454 ml COMPUKLIN
1 × $ 189.00
Limpiador Dieléctrico para Circuitos y Tarjetas Electrónicas 454 ml COMPUKLIN
1 × $ 189.00 -
×
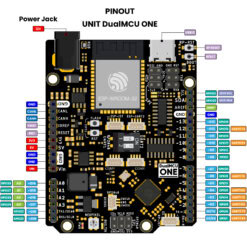
 UNIT DualMCU ONE ESP32 + RP2040
1 × $ 269.00
UNIT DualMCU ONE ESP32 + RP2040
1 × $ 269.00 -
×
 Nema 23 Motor a Pasos 57BYG250C 3A 180 Ncm
1 × $ 397.00
Nema 23 Motor a Pasos 57BYG250C 3A 180 Ncm
1 × $ 397.00
Puede que estés interesado en…
-
Add
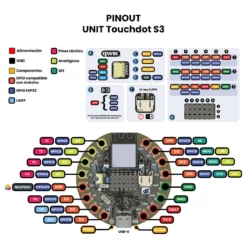
 UNIT Touchdot ESP32-S3 WiFi BT
$ 179.00
UNIT Touchdot ESP32-S3 WiFi BT
$ 179.00 -
Add
 Toallitas Húmedas para Limpieza de Equipos Electrónicos 30pcs COMPUTOALLAS
$ 59.00
Toallitas Húmedas para Limpieza de Equipos Electrónicos 30pcs COMPUTOALLAS
$ 59.00 -
Add
 Limpiador Electrónico en Aerosol 454 ml SILIJET E-7 Plus
$ 169.00
Limpiador Electrónico en Aerosol 454 ml SILIJET E-7 Plus
$ 169.00 -
Add
 Congelante Detector de Falla para Circuitos Electrónicos 170 ml SILIJET E-3
$ 109.00
Congelante Detector de Falla para Circuitos Electrónicos 170 ml SILIJET E-3
$ 109.00 -
Add
 Limpiador y Lubricante para Equipos Electrónicos en Aerosol 170 ml SILIJET E-PLUS
$ 89.00
Limpiador y Lubricante para Equipos Electrónicos en Aerosol 170 ml SILIJET E-PLUS
$ 89.00







































































Valoraciones
No hay valoraciones aún.