-
×
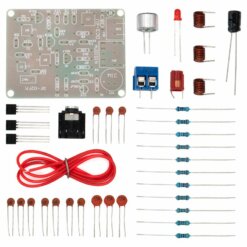 RF-02FM Kit Transmisor FM 88-108 MHz DIY
1 × $ 48.00
RF-02FM Kit Transmisor FM 88-108 MHz DIY
1 × $ 48.00 -
×
 LM386 Modulo Amplificador de Audio 200x 5V-12V
1 × $ 23.00
LM386 Modulo Amplificador de Audio 200x 5V-12V
1 × $ 23.00 -
×
 Galga Extensiometrica BF350 3AA 350 Ohm
1 × $ 13.00
Galga Extensiometrica BF350 3AA 350 Ohm
1 × $ 13.00 -
×
 TPA3116D2 Amplificador de Audio Mono 100W
1 × $ 105.00
TPA3116D2 Amplificador de Audio Mono 100W
1 × $ 105.00 -
×
 PIC18F4520-I/P Microcontrolador 8bits DIP-40
1 × $ 196.00
PIC18F4520-I/P Microcontrolador 8bits DIP-40
1 × $ 196.00 -
×
 HT-PD27W-US Eliminador 27W USB Tipo C PD para Raspberry Pi 5
1 × $ 179.00
HT-PD27W-US Eliminador 27W USB Tipo C PD para Raspberry Pi 5
1 × $ 179.00 -
×
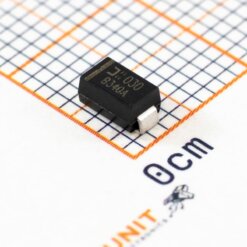 B340A-13-F Schottky 40V 3A SMA
1 × $ 7.00
B340A-13-F Schottky 40V 3A SMA
1 × $ 7.00 -
×
 Espuma Limpiadora para Equipos Electrónicos 454 ml SILIMPO
1 × $ 99.00
Espuma Limpiadora para Equipos Electrónicos 454 ml SILIMPO
1 × $ 99.00 -
×
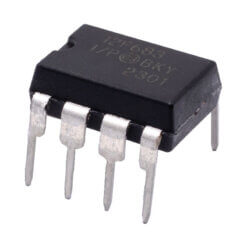 PIC12F683-I/P Microcontrolador 8bits DIP-8
1 × $ 71.00
PIC12F683-I/P Microcontrolador 8bits DIP-8
1 × $ 71.00 -
×
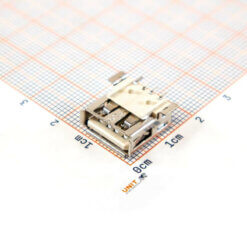 USB-302S-T Conector USB Tipo A Hembra
1 × $ 9.00
USB-302S-T Conector USB Tipo A Hembra
1 × $ 9.00 -
×
 Toallitas Húmedas para Limpieza de Equipos Electrónicos 30pcs COMPUTOALLAS
1 × $ 59.00
Toallitas Húmedas para Limpieza de Equipos Electrónicos 30pcs COMPUTOALLAS
1 × $ 59.00 -
×
 Cable de Osciloscopio de Baja Pérdida 50Ω Q9 BNC-J/BNC-J Macho RG58
1 × $ 454.00
Cable de Osciloscopio de Baja Pérdida 50Ω Q9 BNC-J/BNC-J Macho RG58
1 × $ 454.00 -
×
 RS-06K681JT Resistor 680 Ohms 1/4W 1206 SMD
1 × $ 1.00
RS-06K681JT Resistor 680 Ohms 1/4W 1206 SMD
1 × $ 1.00 -
×
 Buzzer Conector PC BIOS
1 × $ 11.00
Buzzer Conector PC BIOS
1 × $ 11.00 -
×
 Placa PCB Multiusos 0.5/0.8 Mm
1 × $ 10.00
Placa PCB Multiusos 0.5/0.8 Mm
1 × $ 10.00 -
×
 ESP32-CAM OV2640 con CH340 WiFi Bluetooth
1 × $ 244.00
ESP32-CAM OV2640 con CH340 WiFi Bluetooth
1 × $ 244.00 -
×
 Par Cables XT60 12AWG 15cm
1 × $ 75.00
Par Cables XT60 12AWG 15cm
1 × $ 75.00 -
×
 10A10 Diodo Rectificador 1000V 10A
1 × $ 6.00
10A10 Diodo Rectificador 1000V 10A
1 × $ 6.00 -
×
 ADS1115 ADC Amplificador de Ganancia Programable
1 × $ 42.00
ADS1115 ADC Amplificador de Ganancia Programable
1 × $ 42.00 -
×
 Soldador de Gas Tipo Bolígrafo con Accesorios
1 × $ 290.00
Soldador de Gas Tipo Bolígrafo con Accesorios
1 × $ 290.00 -
×
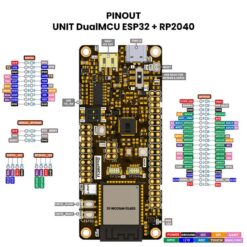
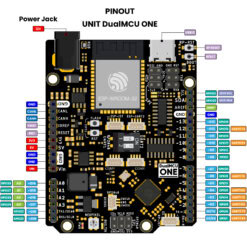
 UNIT Kit DUAL ONE RP2040 + ESP32 10 Practicas en C++
1 × $ 549.00
UNIT Kit DUAL ONE RP2040 + ESP32 10 Practicas en C++
1 × $ 549.00
Puede que estés interesado en…
-
Add
 TDA7294 Amplificador de Audio Mono 100W
$ 138.00
TDA7294 Amplificador de Audio Mono 100W
$ 138.00 -
Add
 TDA7297 Amplificador Audio de Doble Canal 12V DC 15W
$ 91.00
TDA7297 Amplificador Audio de Doble Canal 12V DC 15W
$ 91.00 -
Add
 1002 HiFi Amplificador Bluetooth Estereo 100W
$ 593.00
1002 HiFi Amplificador Bluetooth Estereo 100W
$ 593.00 -
Add
 502L Amplificador Bluetooth Estereo 50W
$ 150.00
502L Amplificador Bluetooth Estereo 50W
$ 150.00 -
Add
 PCM1808 Decodificador de Audio Estereo ADC 99dB SNR 24 Bits
$ 71.00
PCM1808 Decodificador de Audio Estereo ADC 99dB SNR 24 Bits
$ 71.00









































































Valoraciones
No hay valoraciones aún.