-
×
 PCB SMD DIP 8
1 × $ 7.00
PCB SMD DIP 8
1 × $ 7.00 -
×
 Convertidor DC DC 12-24V a 5V 5A Step Down
1 × $ 155.00
Convertidor DC DC 12-24V a 5V 5A Step Down
1 × $ 155.00 -
×
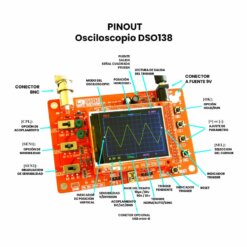
 Osciloscopio DSO138 con Carcasa y Display TFT
1 × $ 452.00
Osciloscopio DSO138 con Carcasa y Display TFT
1 × $ 452.00
Puede que estés interesado en…
-
Add
 Mini 560 Regulador Step Down
$ 32.00
Mini 560 Regulador Step Down
$ 32.00 -
Add
 CP2102 Convertidor USB a TTL
$ 59.00
CP2102 Convertidor USB a TTL
$ 59.00 -
Add
 Regulador AMS1117 5V a 3.3V
$ 11.00
Regulador AMS1117 5V a 3.3V
$ 11.00 -
Add
 Lupa Con Luz Led Pinzas Base Para Cautín Reparar
$ 139.00
Lupa Con Luz Led Pinzas Base Para Cautín Reparar
$ 139.00 -
Add
 Fuente Conmutada 24V 10A
$ 265.00
Fuente Conmutada 24V 10A
$ 265.00






































































Valoraciones
No hay valoraciones aún.