-
×
 Raspberry Pi Pico 2 W RP2350
1 × $ 249.00
Raspberry Pi Pico 2 W RP2350
1 × $ 249.00 -
×
 Cautín de 60W 110V con Puntas Soporte y Esponja
2 × $ 124.00
Cautín de 60W 110V con Puntas Soporte y Esponja
2 × $ 124.00 -
×
 ESP32 S2 Mini Tarjeta de Desarrollo 4MB Flash
1 × $ 97.00
ESP32 S2 Mini Tarjeta de Desarrollo 4MB Flash
1 × $ 97.00 -
×
 Pluma Flux 951 Kester 10ml Non Clean
1 × $ 59.00
Pluma Flux 951 Kester 10ml Non Clean
1 × $ 59.00 -
×
 UNIT Touchdot ESP32-S3 WiFi BT
4 × $ 179.00
UNIT Touchdot ESP32-S3 WiFi BT
4 × $ 179.00 -
×
 Adaptador de Audio Jack 3.5mm a Plug 6.3mm Estéreo
1 × $ 13.00
Adaptador de Audio Jack 3.5mm a Plug 6.3mm Estéreo
1 × $ 13.00 -
×
 Malla Desoldadora de Cobre 2mm 1.5m CP-2015
2 × $ 19.00
Malla Desoldadora de Cobre 2mm 1.5m CP-2015
2 × $ 19.00 -
×
 Módulo WS28B20-1010 Matriz 8x16 LED RGB - UNIT DevLab
1 × $ 119.00
Módulo WS28B20-1010 Matriz 8x16 LED RGB - UNIT DevLab
1 × $ 119.00 -
×
 Kit Limpiador y Protector Antiestático para Pantallas 60 ml LCD CLEANER
1 × $ 99.00
Kit Limpiador y Protector Antiestático para Pantallas 60 ml LCD CLEANER
1 × $ 99.00 -
×
 Gravity Kit de 9 Sensores Compatibles con Arduino DFR0018
1 × $ 601.00
Gravity Kit de 9 Sensores Compatibles con Arduino DFR0018
1 × $ 601.00 -
×
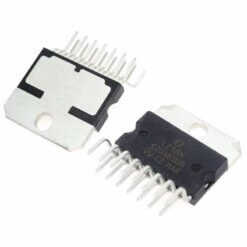
 TDA7297 Amplificador Audio de Doble Canal 12V DC 15W
1 × $ 91.00
TDA7297 Amplificador Audio de Doble Canal 12V DC 15W
1 × $ 91.00 -
×
 SOL60-100 Rollo Soldadura Estaño 100g 60/40 1mm
1 × $ 239.00
SOL60-100 Rollo Soldadura Estaño 100g 60/40 1mm
1 × $ 239.00 -
×
 Módulo Zumbador Pasivo 80 dB - UNIT DevLab
1 × $ 19.00
Módulo Zumbador Pasivo 80 dB - UNIT DevLab
1 × $ 19.00 -
×
 Limpiador y Lubricante para Equipos Electrónicos en Aerosol 170 ml SILIJET E-PLUS
1 × $ 89.00
Limpiador y Lubricante para Equipos Electrónicos en Aerosol 170 ml SILIJET E-PLUS
1 × $ 89.00 -
×
 Limpiador de Alambre para Puntas de Cautín
1 × $ 70.00
Limpiador de Alambre para Puntas de Cautín
1 × $ 70.00 -
×
 Eliminador Raspberry Pi 3 5V 3A
1 × $ 95.00
Eliminador Raspberry Pi 3 5V 3A
1 × $ 95.00
Puede que estés interesado en…
-
Add
 TTP223B Sensor Capacitivo Touch - UNIT DevLab
$ 29.00
TTP223B Sensor Capacitivo Touch - UNIT DevLab
$ 29.00 -
Add
 TEMT600 Sensor de Luz Ambiental – UNIT DevLab
$ 39.00
TEMT600 Sensor de Luz Ambiental – UNIT DevLab
$ 39.00 -
Add
 Toallitas Húmedas para Limpieza de Equipos Electrónicos 30pcs COMPUTOALLAS
$ 59.00
Toallitas Húmedas para Limpieza de Equipos Electrónicos 30pcs COMPUTOALLAS
$ 59.00 -
Add
 Limpiador Dieléctrico para Circuitos y Tarjetas Electrónicas 454 ml COMPUKLIN
$ 189.00
Limpiador Dieléctrico para Circuitos y Tarjetas Electrónicas 454 ml COMPUKLIN
$ 189.00 -
Add
 Limpiador Electrónico en Aerosol 454 ml SILIJET E-7 Plus
$ 169.00
Limpiador Electrónico en Aerosol 454 ml SILIJET E-7 Plus
$ 169.00
















Valoraciones
No hay valoraciones aún.