-
×
 SMDSKQGAKE020 Push Button 6.4x5.2mm
1 × $ 2.00
SMDSKQGAKE020 Push Button 6.4x5.2mm
1 × $ 2.00 -
×
 Set de Pinzas con Punta de Cerámica
1 × $ 113.00
Set de Pinzas con Punta de Cerámica
1 × $ 113.00 -
×
 Sensor Interruptor Mercurio KY-017
1 × $ 13.00
Sensor Interruptor Mercurio KY-017
1 × $ 13.00 -
×
 PAM8610 Amplificador Estéreo 2x15W 12V
1 × $ 38.00
PAM8610 Amplificador Estéreo 2x15W 12V
1 × $ 38.00 -
×
 Led Bicolor 3mm KY-029
1 × $ 25.00
Led Bicolor 3mm KY-029
1 × $ 25.00 -
×
 LED RGB SMD 2020 FM-B2020RGBA-HG
1 × $ 2.00
LED RGB SMD 2020 FM-B2020RGBA-HG
1 × $ 2.00 -
×
 Tira Led Neopixel 5m WS2812B
1 × $ 349.00
Tira Led Neopixel 5m WS2812B
1 × $ 349.00 -
×
 PIC12F675-IP Microcontrolador 8bits DIP-8
1 × $ 32.00
PIC12F675-IP Microcontrolador 8bits DIP-8
1 × $ 32.00 -
×
 Sensor Interruptor Magnético KY-021
1 × $ 15.00
Sensor Interruptor Magnético KY-021
1 × $ 15.00 -
×
 Cautín de 90W 110V con Puntas Soporte y Esponja
1 × $ 283.00
Cautín de 90W 110V con Puntas Soporte y Esponja
1 × $ 283.00 -
×
 Adaptador USB Tipo C a DIP PCB 36 Pines
1 × $ 37.00
Adaptador USB Tipo C a DIP PCB 36 Pines
1 × $ 37.00 -
×
 2SC5200 Transistor NPN 230V 15A TO-3PL
1 × $ 34.00
2SC5200 Transistor NPN 230V 15A TO-3PL
1 × $ 34.00 -
×
 TCA9545APWR Multiplexor
1 × $ 70.27
TCA9545APWR Multiplexor
1 × $ 70.27 -
×
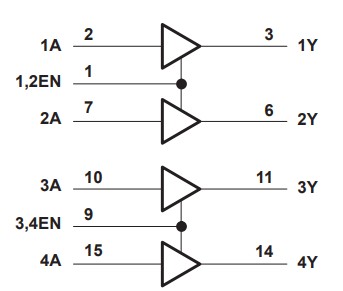
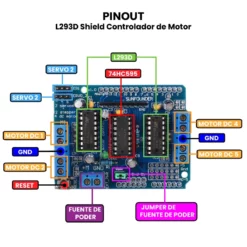
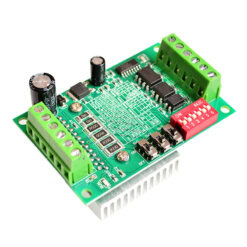
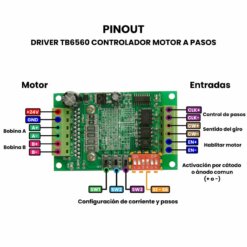
 Controlador de Motor a Pasos 5V-12V DC
1 × $ 140.00
Controlador de Motor a Pasos 5V-12V DC
1 × $ 140.00 -
×
 CAU-170 Desoldador de Succión
1 × $ 127.00
CAU-170 Desoldador de Succión
1 × $ 127.00 -
×
 Sonoff S-MATE Interruptor Mate Sin Neutro
1 × $ 80.00
Sonoff S-MATE Interruptor Mate Sin Neutro
1 × $ 80.00 -
×
 Kit de 65 Preset RM065 13 distintos valores
1 × $ 121.00
Kit de 65 Preset RM065 13 distintos valores
1 × $ 121.00 -
×
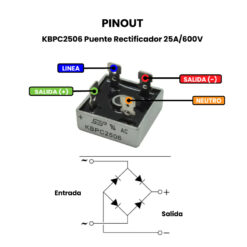
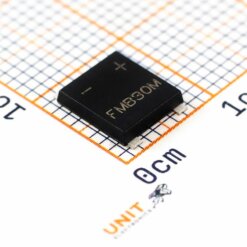
 FMSB30M Puente Rectificador 1000V 3A SMD
1 × $ 9.00
FMSB30M Puente Rectificador 1000V 3A SMD
1 × $ 9.00 -
×
 Interruptor Fin de Carrera 125V 1A Limit Switch
1 × $ 4.00
Interruptor Fin de Carrera 125V 1A Limit Switch
1 × $ 4.00 -
×
 Convertidor DC DC 12-24V a 5V 5A Step Down
1 × $ 155.00
Convertidor DC DC 12-24V a 5V 5A Step Down
1 × $ 155.00 -
×
 Sensor de Impacto KY-031
1 × $ 17.00
Sensor de Impacto KY-031
1 × $ 17.00 -
×
 WeMos ESP32 D1 R32 WiFi + Bluetooth 4MB Flash Tarjeta Desarrollo
1 × $ 133.00
WeMos ESP32 D1 R32 WiFi + Bluetooth 4MB Flash Tarjeta Desarrollo
1 × $ 133.00 -
×
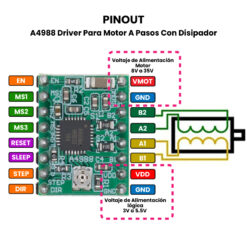
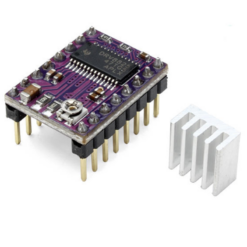 DRV8825 Driver para Motor a Pasos
1 × $ 43.00
DRV8825 Driver para Motor a Pasos
1 × $ 43.00
Puede que estés interesado en…
-
Add
 Pasta Limpiadora para Puntas de Cautín 6g
$ 34.00
Pasta Limpiadora para Puntas de Cautín 6g
$ 34.00 -
Add
 CAU-115A Cautin Tipo Lapiz de 35W 127V con Accesorios
$ 159.00
CAU-115A Cautin Tipo Lapiz de 35W 127V con Accesorios
$ 159.00 -
Add
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto
 Lámpara de Escritorio con Aumento Negro o Blanco
Rango de precios: desde $ 367.00 hasta $ 408.00
Lámpara de Escritorio con Aumento Negro o Blanco
Rango de precios: desde $ 367.00 hasta $ 408.00 -
Add
 Protoboard de 400pts y 830pts Blanco o Transparente
$ 27.00
Protoboard de 400pts y 830pts Blanco o Transparente
$ 27.00 -
Add
 TE-808 Lupa de Soldadura con Abrazadera Universal
El precio original era: $ 706.00.$ 635.00El precio actual es: $ 635.00.
TE-808 Lupa de Soldadura con Abrazadera Universal
El precio original era: $ 706.00.$ 635.00El precio actual es: $ 635.00.



















Valoraciones
No hay valoraciones aún.