-
×
 Flux Limpiador para Soldar 250 ML
1 × $ 117.00
Flux Limpiador para Soldar 250 ML
1 × $ 117.00 -
×
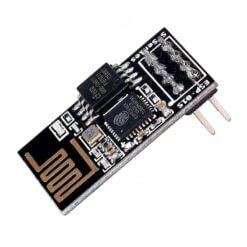 ESP-01S Módulo WiFi ESP8266
1 × $ 52.00
ESP-01S Módulo WiFi ESP8266
1 × $ 52.00 -
×
 CAU-115A Cautin Tipo Lapiz de 35W 127V con Accesorios
1 × $ 159.00
CAU-115A Cautin Tipo Lapiz de 35W 127V con Accesorios
1 × $ 159.00 -
×
 MT3608 Elevador de Voltaje Boost Step Up 6W 2A
1 × $ 21.00
MT3608 Elevador de Voltaje Boost Step Up 6W 2A
1 × $ 21.00 -
×
 74LS73 Flip Flop JK TTL DIP-14
1 × $ 13.00
74LS73 Flip Flop JK TTL DIP-14
1 × $ 13.00 -
×
 TCC0603X7R102K500CT Capacitor Cerámico 0603 1nF 50V
1 × $ 1.00
TCC0603X7R102K500CT Capacitor Cerámico 0603 1nF 50V
1 × $ 1.00 -
×
 Sensor Infrarrojo Sharp GP2Y0A21YK0F de 10-80cm
1 × $ 141.00
Sensor Infrarrojo Sharp GP2Y0A21YK0F de 10-80cm
1 × $ 141.00 -
×
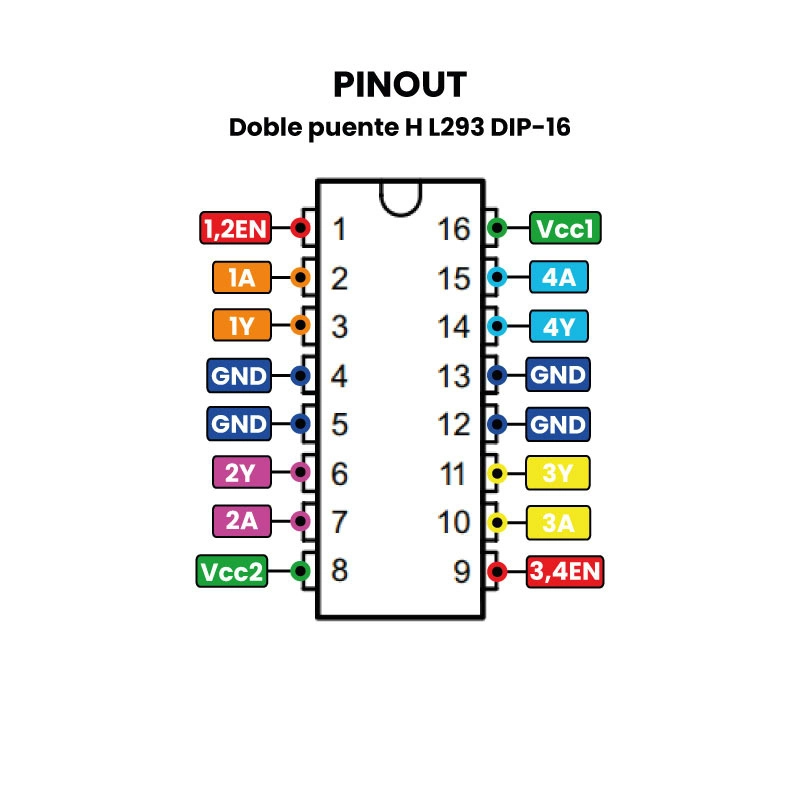
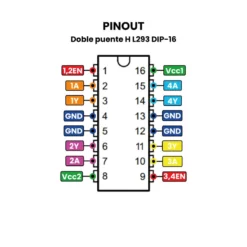
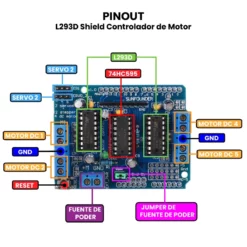
 L293D Shield Controlador de Motor
1 × $ 70.00
L293D Shield Controlador de Motor
1 × $ 70.00
Puede que estés interesado en…
-
Add
 CAU-118 Punta Conica para Cautin CAU-105 y CAU-115
$ 16.00
CAU-118 Punta Conica para Cautin CAU-105 y CAU-115
$ 16.00 -
Add
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto
 Soldadura en Pasta Mechanic 60 /200/ 500 g
Rango de precios: desde $ 147.00 hasta $ 840.00
Soldadura en Pasta Mechanic 60 /200/ 500 g
Rango de precios: desde $ 147.00 hasta $ 840.00 -
Add
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto
 Tinta UV para PCB Verde / Rojo / Azul / Negro / Blanco
Rango de precios: desde $ 45.00 hasta $ 55.00
Tinta UV para PCB Verde / Rojo / Azul / Negro / Blanco
Rango de precios: desde $ 45.00 hasta $ 55.00 -
Add
 Soldador de Gas Tipo Bolígrafo con Accesorios
$ 290.00
Soldador de Gas Tipo Bolígrafo con Accesorios
$ 290.00 -
Add
 Set de Pinzas con Punta de Cerámica
$ 113.00
Set de Pinzas con Punta de Cerámica
$ 113.00



















Valoraciones
No hay valoraciones aún.