-
×
 LED Azul SMD 1206 NCD1206B1
1 × $ 3.00
LED Azul SMD 1206 NCD1206B1
1 × $ 3.00 -
×
 HT1623 IC SMD
1 × $ 25.78
HT1623 IC SMD
1 × $ 25.78 -
×
 HDP1160V4S Fuente de Alimentación 0-160V 4A
1 × $ 5,873.00
HDP1160V4S Fuente de Alimentación 0-160V 4A
1 × $ 5,873.00 -
×
 Conector XT90 Par Hembra Macho
1 × $ 26.00
Conector XT90 Par Hembra Macho
1 × $ 26.00 -
×
 Cautín de 60W 110V con Puntas Soporte y Esponja
1 × $ 124.00
Cautín de 60W 110V con Puntas Soporte y Esponja
1 × $ 124.00 -
×
 Poster Simbolos Esquemáticos
1 × $ 32.00
Poster Simbolos Esquemáticos
1 × $ 32.00 -
×
 FireBeetle 2 ESP32-S3 (N16R8) AIoT con Cámara DFR0975
1 × $ 534.00
FireBeetle 2 ESP32-S3 (N16R8) AIoT con Cámara DFR0975
1 × $ 534.00 -
×
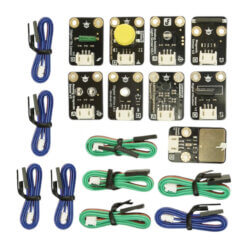 Gravity Kit de 9 Sensores Compatibles con Arduino DFR0018
1 × $ 601.00
Gravity Kit de 9 Sensores Compatibles con Arduino DFR0018
1 × $ 601.00 -
×
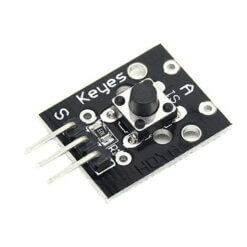 Push Button KY-004
1 × $ 12.00
Push Button KY-004
1 × $ 12.00 -
×
 Sonoff S31 Lite Zb Socket Inteligente Zigbee Version
1 × $ 287.00
Sonoff S31 Lite Zb Socket Inteligente Zigbee Version
1 × $ 287.00 -
×
 Juego de Engranes 58 Tipos
1 × $ 74.00
Juego de Engranes 58 Tipos
1 × $ 74.00 -
×
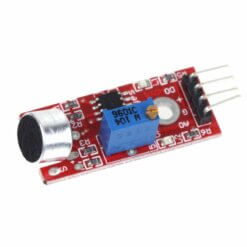 Sensor de Sonido KY-037
1 × $ 16.00
Sensor de Sonido KY-037
1 × $ 16.00 -
×
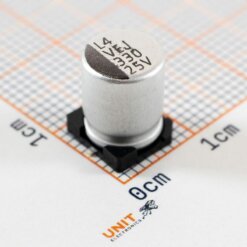 Capacitor Electrolítico 330uF 25V SMD
1 × $ 10.00
Capacitor Electrolítico 330uF 25V SMD
1 × $ 10.00 -
×
 Capacitor Electrolítico 1uF 100V SMD
1 × $ 2.00
Capacitor Electrolítico 1uF 100V SMD
1 × $ 2.00 -
×
 Sensor Ultrasónico HC-SR04
1 × $ 29.00
Sensor Ultrasónico HC-SR04
1 × $ 29.00 -
×
 Led Bicolor 3mm KY-029
1 × $ 25.00
Led Bicolor 3mm KY-029
1 × $ 25.00 -
×
 Modulo 8 display 7 segmentos MAX7219 Rojo
1 × $ 45.00
Modulo 8 display 7 segmentos MAX7219 Rojo
1 × $ 45.00 -
×
 Flux Limpiador para Soldar 250 ML
1 × $ 117.00
Flux Limpiador para Soldar 250 ML
1 × $ 117.00 -
×
 Malla Desoldadora de Cobre 2mm 1.5m CP-2015
1 × $ 19.00
Malla Desoldadora de Cobre 2mm 1.5m CP-2015
1 × $ 19.00 -
×
 Sonoff RFR2 Interruptor WiFi/RF 433MHz 10A
1 × $ 190.00
Sonoff RFR2 Interruptor WiFi/RF 433MHz 10A
1 × $ 190.00 -
×
 BTS7960 Driver Puente H 43A
1 × $ 104.00
BTS7960 Driver Puente H 43A
1 × $ 104.00
Puede que estés interesado en…
-
Add
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto
 Cable USB 2.0 para Datos o Alimentación
Rango de precios: desde $ 12.00 hasta $ 16.00
Cable USB 2.0 para Datos o Alimentación
Rango de precios: desde $ 12.00 hasta $ 16.00 -
Add
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto
 Protoboard de 400pts y 830pts Blanco o Transparente
Rango de precios: desde $ 16.00 hasta $ 44.00
Protoboard de 400pts y 830pts Blanco o Transparente
Rango de precios: desde $ 16.00 hasta $ 44.00 -
Add
 Cloruro Férrico de 250 ML
$ 42.00
Cloruro Férrico de 250 ML
$ 42.00 -
Add
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto
 Tinta UV para PCB Verde / Rojo / Azul / Negro / Blanco
Rango de precios: desde $ 45.00 hasta $ 55.00
Tinta UV para PCB Verde / Rojo / Azul / Negro / Blanco
Rango de precios: desde $ 45.00 hasta $ 55.00 -
Add
 Soldador de Gas Tipo Bolígrafo con Accesorios
$ 290.00
Soldador de Gas Tipo Bolígrafo con Accesorios
$ 290.00



















Valoraciones
No hay valoraciones aún.