-
×
 TE-613 Tapete Silicon Térmico 35x25cm
4 × $ 113.00
TE-613 Tapete Silicon Térmico 35x25cm
4 × $ 113.00 -
×
 CAU-115A Cautin Tipo Lapiz de 35W 127V con Accesorios
3 × $ 159.00
CAU-115A Cautin Tipo Lapiz de 35W 127V con Accesorios
3 × $ 159.00 -
×
 Conector Estéreo de 3.5mm 90 grados Niquelado Negro
1 × $ 16.00
Conector Estéreo de 3.5mm 90 grados Niquelado Negro
1 × $ 16.00 -
×
 Plug 3.5mm TRRS Metálico
1 × $ 11.00
Plug 3.5mm TRRS Metálico
1 × $ 11.00 -
×
 Punta de Prueba SMD para Multímetro
2 × $ 64.00
Punta de Prueba SMD para Multímetro
2 × $ 64.00 -
×
 UNIT Kit UNO Básico con 13 practicas
2 × $ 249.00
UNIT Kit UNO Básico con 13 practicas
2 × $ 249.00 -
×
 TTP223B Sensor Capacitivo Touch - UNIT DevLab
2 × $ 29.00
TTP223B Sensor Capacitivo Touch - UNIT DevLab
2 × $ 29.00 -
×
 HDP180V8S Fuente de Alimentación 0-80V 8A
1 × $ 4,763.00
HDP180V8S Fuente de Alimentación 0-80V 8A
1 × $ 4,763.00 -
×
 Pasta Limpiadora para Puntas de Cautín 6g
4 × $ 34.00
Pasta Limpiadora para Puntas de Cautín 6g
4 × $ 34.00 -
×
 Espuma Limpiadora para Equipos Electrónicos 454 ml SILIMPO
3 × $ 99.00
Espuma Limpiadora para Equipos Electrónicos 454 ml SILIMPO
3 × $ 99.00 -
×
 UNIT Pulsar ESP32-C6
4 × $ 189.00
UNIT Pulsar ESP32-C6
4 × $ 189.00 -
×
 HDP1160V4S Fuente de Alimentación 0-160V 4A
1 × $ 5,873.00
HDP1160V4S Fuente de Alimentación 0-160V 4A
1 × $ 5,873.00 -
×
 Cepillo de Alambre de Latón y Acero Inoxidable para Limpieza de Boquillas
1 × $ 39.00
Cepillo de Alambre de Latón y Acero Inoxidable para Limpieza de Boquillas
1 × $ 39.00 -
×
 SN-01BM Prensa para Terminales XH2.54 PH2.0
1 × $ 345.00
SN-01BM Prensa para Terminales XH2.54 PH2.0
1 × $ 345.00 -
×
 Raspberry Pi Pico W
1 × $ 208.00
Raspberry Pi Pico W
1 × $ 208.00 -
×
 PShieldX Shield de Expansión para Raspberry Pi Pico
1 × $ 456.00
PShieldX Shield de Expansión para Raspberry Pi Pico
1 × $ 456.00 -
×
 UNIT Placa de Expansión para Raspberry Pi Pico
3 × $ 79.00
UNIT Placa de Expansión para Raspberry Pi Pico
3 × $ 79.00 -
×
 Flux Limpiador para Soldar 250 ML
1 × $ 117.00
Flux Limpiador para Soldar 250 ML
1 × $ 117.00 -
×
 X-HX0598A Probador de Baterias de Litio 18650 BT4-1CHN
1 × $ 179.00
X-HX0598A Probador de Baterias de Litio 18650 BT4-1CHN
1 × $ 179.00 -
×
 Limpiador Dieléctrico para Circuitos y Tarjetas Electrónicas 454 ml COMPUKLIN
1 × $ 189.00
Limpiador Dieléctrico para Circuitos y Tarjetas Electrónicas 454 ml COMPUKLIN
1 × $ 189.00 -
×
 Kit Conectores LT41 de Empalme Rápido 75pcs
1 × $ 208.00
Kit Conectores LT41 de Empalme Rápido 75pcs
1 × $ 208.00 -
×
 HB-019 Desoldador de Succión Eléctrico 36W 110V
1 × $ 139.00
HB-019 Desoldador de Succión Eléctrico 36W 110V
1 × $ 139.00 -
×
 46204 Clavija Industrial Plástica Volteck
1 × $ 17.00
46204 Clavija Industrial Plástica Volteck
1 × $ 17.00 -
×
 MUL-281 Multímetro Profesional RMS con Detector de Voltaje
1 × $ 299.00
MUL-281 Multímetro Profesional RMS con Detector de Voltaje
1 × $ 299.00 -
×
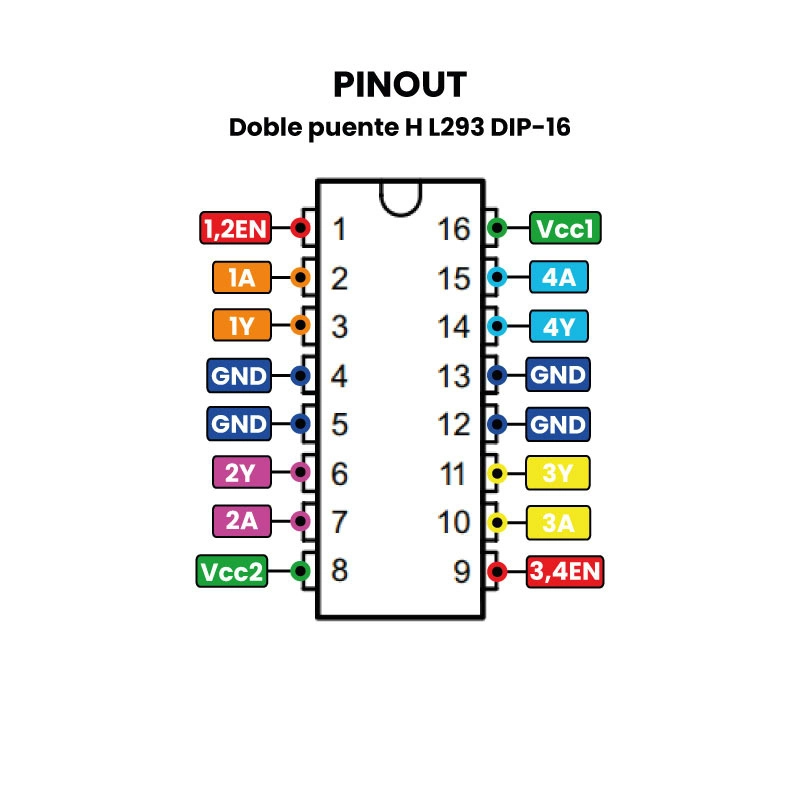
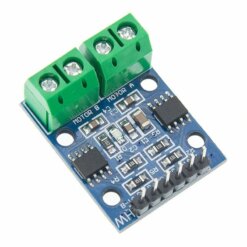
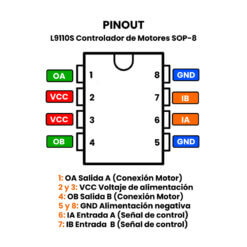
 L9110S Controlador de Motores SOP-8
1 × $ 12.00
L9110S Controlador de Motores SOP-8
1 × $ 12.00
Puede que estés interesado en…
-
Add
 CAU-118 Punta Conica para Cautin CAU-105 y CAU-115
$ 16.00
CAU-118 Punta Conica para Cautin CAU-105 y CAU-115
$ 16.00 -
Add
 UNIT Touchdot ESP32-S3 WiFi BT
$ 179.00
UNIT Touchdot ESP32-S3 WiFi BT
$ 179.00 -
Add
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto
 GX-9877 Interruptor Tactil Unicolor/Bicolor para Espejos 12V 3A
Rango de precios: desde $ 58.00 hasta $ 65.00
GX-9877 Interruptor Tactil Unicolor/Bicolor para Espejos 12V 3A
Rango de precios: desde $ 58.00 hasta $ 65.00 -
Add
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto
 Boton Tactil Capacitivo Verde/Rojo/Azul
$ 26.00
Boton Tactil Capacitivo Verde/Rojo/Azul
$ 26.00 -
Add
 Toallitas Húmedas para Limpieza de Equipos Electrónicos 30pcs COMPUTOALLAS
$ 59.00
Toallitas Húmedas para Limpieza de Equipos Electrónicos 30pcs COMPUTOALLAS
$ 59.00

















Valoraciones
No hay valoraciones aún.