-
×
 KBL406 Puente Rectificador 600V 4A
1 × $ 7.00
KBL406 Puente Rectificador 600V 4A
1 × $ 7.00
Puede que estés interesado en…
🔥 ¡Hot Week 2026! 🔥 Ofertas exclusivas para ti 👨👩👦👦. Válido del 25 de mayo al 02 de junio 📅
Saltar al contenido


$ 12.00
554 disponibles
| CANTIDAD | PRECIO |
|---|---|
| 25 piezas | $ 9.24 |
| 100 piezas | $ 7.89 |
| 200 piezas | $ 6.10 |
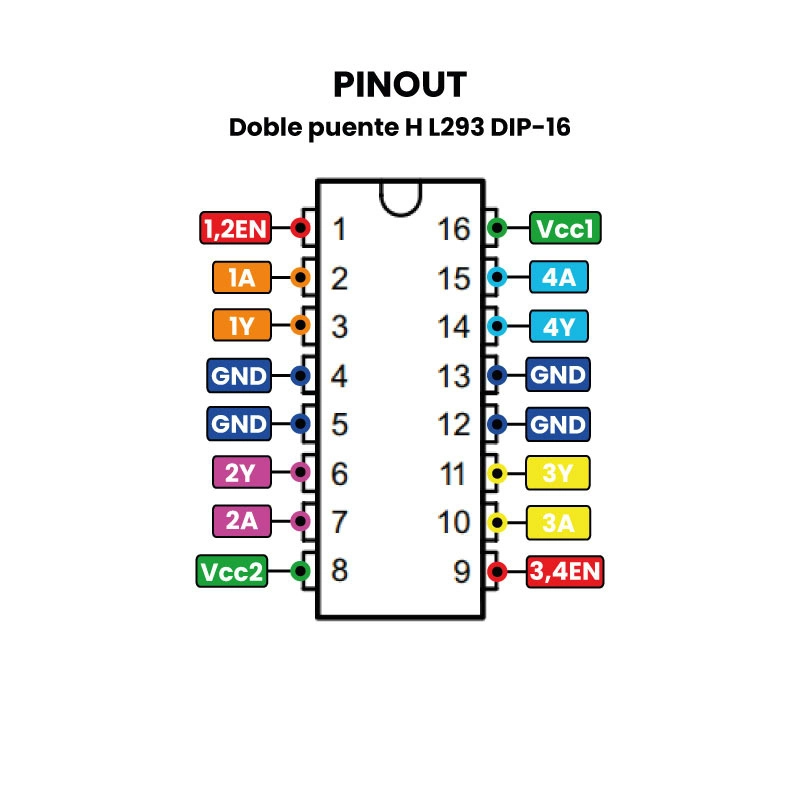
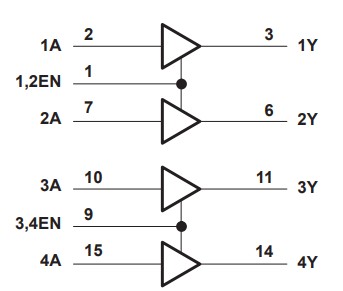
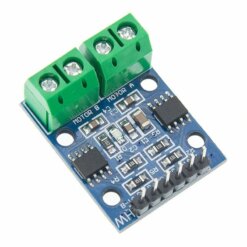
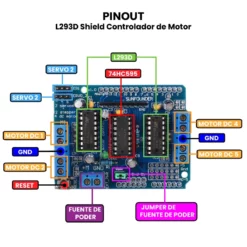
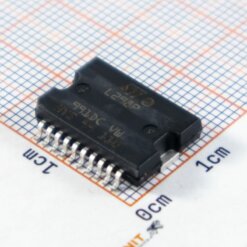
El puente H L293D es un circuito integrado que internamente está formado por cuatro canales monolíticos integrados de alto voltaje y corriente diseñado para aceptar niveles lógicos DTL o TTL estándar y conducir cargas inductivas como relevadores, solenoides, motores corriente directa, motores a pasos y transistores de potencia de conmutación. Este circuito integrado regularmente se utiliza para controlar motores de corriente directa.
El L293D por ser un controlador de motor bidireccional es útil y versátil, ya que tiene la capacidad de protegerse a sí mismo y a los motores contra sobrecorrientes y sobrecalentamientos. Esto lo convierte en una opción ideal para ser utilizado en una amplia variedad de proyectos de robótica y automatización. Es fácil de usar y seguro, lo que lo convierte en una opción popular para muchos proyectos.
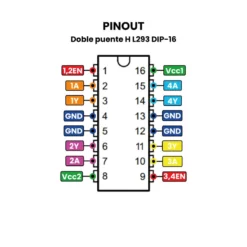
De acuerdo a la lógica de ejecución para un motor de corriente continua, el giro lo puedes manipular en función de la tensión que se le aplique a las terminales. Por ejemplo, para activar el motor uno, se debe activar E1 e ingresar en las terminales de control los niveles de tensión para manejar el sentido de giro. Para lograr este cambio controlado de polaridad nos apoyamos en un circuito integrado conocido como Puente H (es una disposición de transistores y diodos que nos permite controlar la polaridad de dos terminales de salida en función de unas entradas lógicas), como caso particular el circuito integrado Puente H L293D.
A continuación, se muestra el diagrama interno del L293D
Se utiliza principalmente para diferentes proyectos de electrónica, robótica y electromecánica, como bien sabemos, las placas de desarrollo que utilizamos funcionan a bajos voltajes y requieren una pequeña cantidad de corriente, mientras tanto los motores requieren un voltaje y corriente aún mayores. Por lo tanto, no podemos alimentar a los motores desde el microcontrolador. Esta es nuestra necesidad de utilizar el circuito integrado L293D.
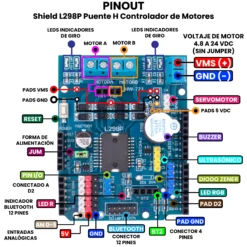
Puedes implementar un shield L293D, este tiene la capacidad de controlar hasta cuatro motores de corriente directa, dos servomotores, cuatro solenoides, y etc.
| Peso | 0.0015 kg |
|---|---|
| Dimensiones | 0.01 × 0.01 × 0.01 cm |
Solo los usuarios registrados que hayan comprado este producto pueden hacer una valoración.








DRIVERS








Valoraciones
No hay valoraciones aún.