-
×
 PIC12F615-I/P Microcontrolador 8bits DIP-8
1 × $ 33.00
PIC12F615-I/P Microcontrolador 8bits DIP-8
1 × $ 33.00 -
×
 Pantalla Táctil 2.8" IoT DFR0706-EN UNIHIKER
1 × $ 1,519.00
Pantalla Táctil 2.8" IoT DFR0706-EN UNIHIKER
1 × $ 1,519.00 -
×
 MJ15004 Transistor PNP -140V -20A TO-3
1 × $ 22.00
MJ15004 Transistor PNP -140V -20A TO-3
1 × $ 22.00 -
×
 Terminal SH1.0mm SH 1mm
1 × $ 0.20
Terminal SH1.0mm SH 1mm
1 × $ 0.20 -
×
 TPA3110 Amplificador Estereo 2x15W 12V
1 × $ 58.00
TPA3110 Amplificador Estereo 2x15W 12V
1 × $ 58.00 -
×
 RTT05105JTP Resistor 1M Ohms 1/8W 0805 SMD
1 × $ 1.00
RTT05105JTP Resistor 1M Ohms 1/8W 0805 SMD
1 × $ 1.00 -
×
 Limpiador Electrónico en Aerosol 454 ml SILIJET E-7 Plus
1 × $ 169.00
Limpiador Electrónico en Aerosol 454 ml SILIJET E-7 Plus
1 × $ 169.00 -
×
 Puntas para Multímetro de 1000V 10A
1 × $ 29.00
Puntas para Multímetro de 1000V 10A
1 × $ 29.00 -
×
 Limpiador Dieléctrico para Circuitos y Tarjetas Electrónicas 454 ml COMPUKLIN
1 × $ 189.00
Limpiador Dieléctrico para Circuitos y Tarjetas Electrónicas 454 ml COMPUKLIN
1 × $ 189.00 -
×
 Termistor NTC KY-013
1 × $ 14.00
Termistor NTC KY-013
1 × $ 14.00 -
×
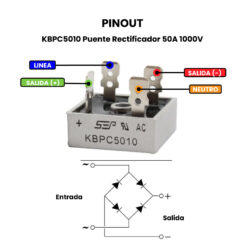
 KBU1010 Puente Rectificador 1000V 10A
1 × $ 13.00
KBU1010 Puente Rectificador 1000V 10A
1 × $ 13.00
Puede que estés interesado en…
-
Add
 Toallitas Húmedas para Limpieza de Equipos Electrónicos 30pcs COMPUTOALLAS
$ 59.00
Toallitas Húmedas para Limpieza de Equipos Electrónicos 30pcs COMPUTOALLAS
$ 59.00 -
Add
 Espuma Limpiadora para Equipos Electrónicos 454 ml SILIMPO
$ 99.00
Espuma Limpiadora para Equipos Electrónicos 454 ml SILIMPO
$ 99.00 -
Add
 Congelante Detector de Falla para Circuitos Electrónicos 170 ml SILIJET E-3
$ 109.00
Congelante Detector de Falla para Circuitos Electrónicos 170 ml SILIJET E-3
$ 109.00 -
Add
 Limpiador y Lubricante para Equipos Electrónicos en Aerosol 170 ml SILIJET E-PLUS
$ 89.00
Limpiador y Lubricante para Equipos Electrónicos en Aerosol 170 ml SILIJET E-PLUS
$ 89.00 -
Add
 Limpiador de Pantallas 170 ml COMPUSTAT
$ 79.00
Limpiador de Pantallas 170 ml COMPUSTAT
$ 79.00

















Valoraciones
No hay valoraciones aún.