
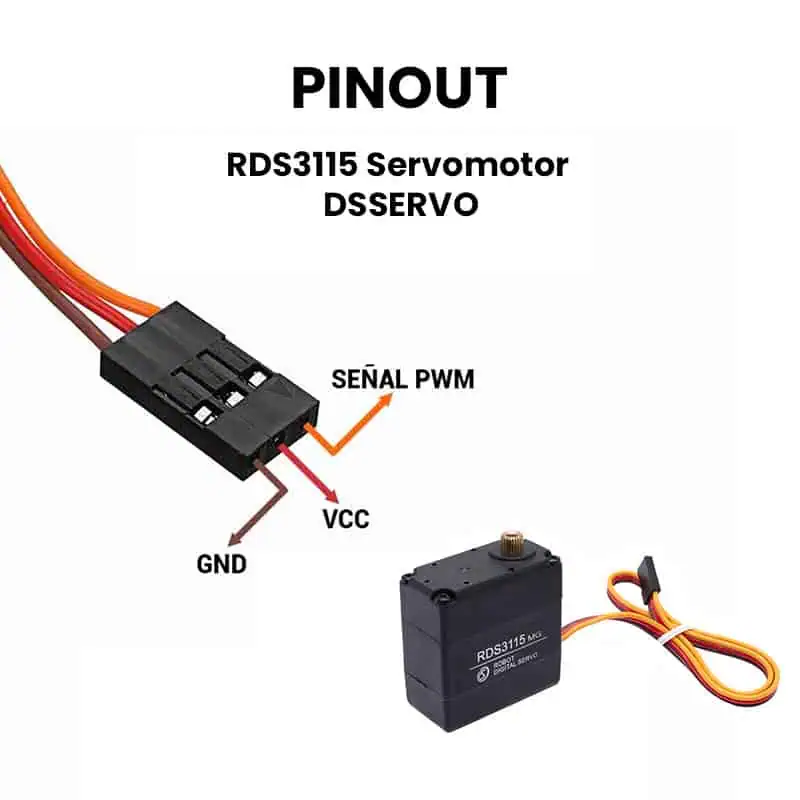



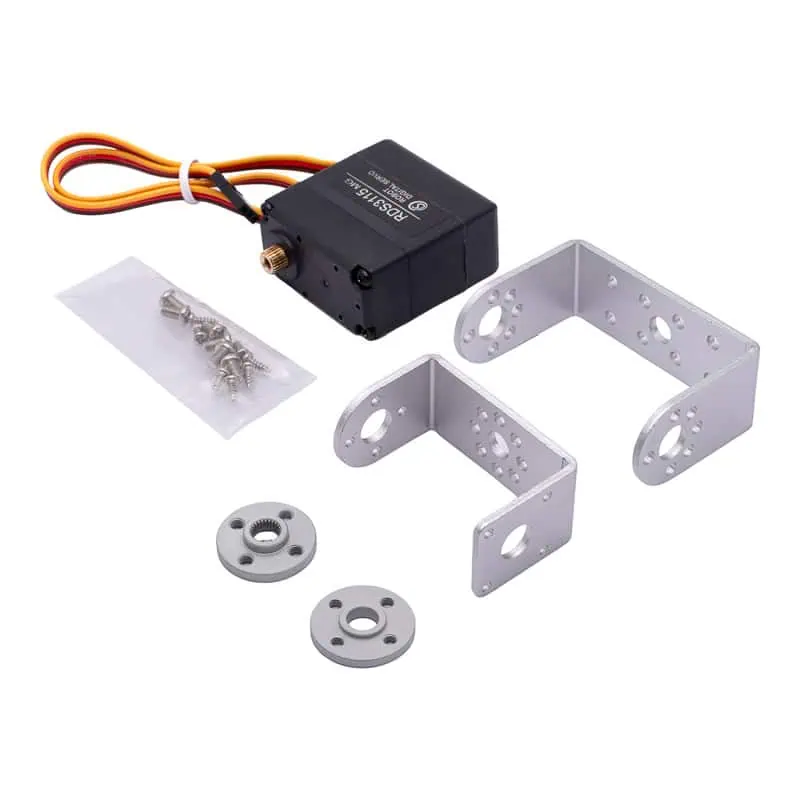








RDS3115 Servomotor 15Kg DSSERVO
$ 313.00
170 disponibles
| CANTIDAD | PRECIO |
|---|---|
| 10 piezas | $ 284.32 |
| 15 piezas | $ 260.93 |
| 25 piezas | $ 241.10 |
INFORMACIÓN
El Servomotor RDS3115 DSSERVO es un tipo de motor controlado por PWM que utiliza un tren de engranajes metálicos. Incorpora doble rodamiento de bolas. Además, su eje doble permite montajes simétricos en estructuras robóticas, acoplamiento de brazos o palancas y mayor estabilidad en mecanismos articulados.
Debido a su combinación de alta fuerza, durabilidad, precisión y resistencia ambiental, el RDS3115 se utiliza ampliamente en brazos robóticos, mecanismos de dirección en vehículos RC, sistemas actuados por PWM y estructuras que requieren fiabilidad mecánica con control digital.
ESPECIFICACIONES Y CARACTERÍSTICAS
- Marca: DSSERVO
- Voltaje de alimentación: 4.8 – 6.8 V
- Relación de transmisión: 275:1
- Corriente en reposo: 5mA
- Carga máxima: 15 kg*cm
- Corriente a eje bloqueado: 1.5A
- Frecuencia PWM: 50-330 Hz
- Peso: 68 g
DOCUMENTACIÓN Y RECURSOS
INFORMACIÓN ADICIONAL
Prueba rápida de funcionamiento del Servomotor RDS Alto Torque Eje Doble DSSERVO
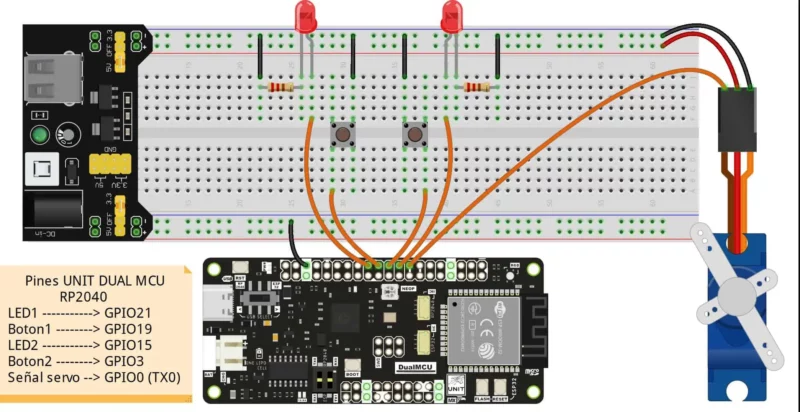
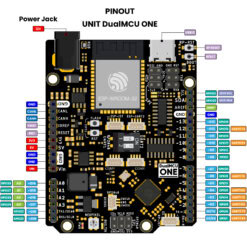
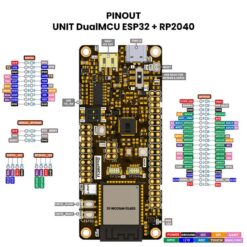
Arma el siguiente circuito y carga en una tarjeta UNIT DUAL MCU, el código en MicroPython utilizando Thonny IDE para controlar la posición del eje del servomotor al pulsar uno u otro botón.
Código
#Este código también funciona en el ESP32 mismo que se incluye en el UNIT DUAL MCU o por separado, solo recuerda cargar el bootloader de MicroPython y revisar los pines
import machine
import utime
# Configuración de los botones
boton1 = machine.Pin(19, machine.Pin.IN, machine.Pin.PULL_UP)
boton2 = machine.Pin(3, machine.Pin.IN, machine.Pin.PULL_UP)
# Configuración de los LEDs (opcional)
led1 = machine.Pin(21, machine.Pin.OUT)
led2 = machine.Pin(15, machine.Pin.OUT)
# Configuración del pin de control del servomotor
servo_pin = machine.Pin(0)
# Crea un objeto PWM para controlar el servomotor
pwm_servo = machine.PWM(servo_pin)
# Frecuencia del PWM para el servomotor (50 Hz)
pwm_servo.freq(50)
# Función para ajustar el ángulo del servomotor
def set_servo_angle(angle):
duty_cycle = int(1024 + (angle / 180) * 3072)
pwm_servo.duty_u16(duty_cycle)
try:
valor = 90 # Ángulo inicial en 90 grados
while True:
# Si el botón 1 está presionado, mueve el servomotor en una dirección (aumenta el ángulo)
if boton1.value() == 0: # Si el botón 1 está presionado
if valor < 390:
valor += 10
set_servo_angle(valor)
print(f"Ángulo del servo: {valor} grados") # Solo para depuración
led1.on() # Enciende el LED1 cuando el botón 1 está presionado
led2.off() # Apaga el LED2
# Si el botón 2 está presionado, mueve el servomotor en la dirección opuesta (disminuye el ángulo)
elif boton2.value() == 0: # Si el botón 2 está presionado
if valor > 0:
valor -= 10
set_servo_angle(valor)
print(f"Ángulo del servo: {valor} grados")
led2.on() # Enciende el LED2 cuando el botón 2 está presionado
led1.off() # Apaga el LED1
else:
led1.off() # Apaga LED1 cuando no se presiona el botón 1
led2.off() # Apaga LED2 cuando no se presiona el botón 2
utime.sleep(0.02) # Pausa corta para evitar lecturas innecesarias
except KeyboardInterrupt:
# Detén el PWM y limpia los recursos al interrumpir el programa con Ctrl+C
pwm_servo.deinit()
print("nPWM detenido. Recursos liberados.")
INFORMACIÓN ADICIONAL
Dada la alta potencia de torque de la serie DSServo, es fundamental observar las siguientes precauciones para evitar daños físicos o fallos en el equipo:
-
Riesgo de Lesiones Mecánicas: La fuerza ejercida por estos servos es suficiente para causar fracturas o aplastamientos graves en dedos y manos. Nunca manipule el varillaje o el brazo del servo mientras el sistema esté energizado.
-
Gestión Eléctrica Crítica: Estos dispositivos demandan corrientes de pico elevadas. El uso de cables delgados o fuentes de alimentación insuficientes puede provocar incendios por sobrecalentamiento o comportamientos erráticos del controlador.
-
Estrés Térmico: La carcasa metálica funciona como disipador de calor. Tras un uso intensivo, la temperatura puede ser lo suficientemente alta como para causar quemaduras por contacto directo.
Los productos de la serie RDSServo se utilizan ampliamente en el modelismo de gran escala, así como en el desarrollo de robótica avanzada como brazos articulados de carga, hexápodos pesados y exoesqueletos. En el sector industrial y de energías renovables, se implementan en sistemas de seguimiento solar (solar trackers) y automatización de válvulas o compuertas, mientras que en la industria del entretenimiento son el estándar para el movimiento de animatrónicos de tamaño real, efectos especiales cinematográficos y simuladores de vuelo que requieren una alta densidad de torque en un formato compacto.
ENLACES EXTERNOS
- Tutorial – Servomotor con Arduino
- Modulación por Ancho de Pulso (PWM) – Explicación Definitiva – Video
- PWM Explicado | Cómo hacer un controlador de velocidad de motores DC – Video
- Controlemos un Servomotor usando el potenciómetro – Video
- Como usar y controlar un Servomotor – Video
- Arduino desde cero en Español – Capítulo 6 – Servomotor – Video
- Servomotor Explicado – Video
- ¿Qué es un servomotor y qué hace? – Video
| Peso | 0.092 kg |
|---|---|
| Dimensiones | 7 × 9 × 2.5 cm |
Solo los usuarios registrados que hayan comprado este producto pueden hacer una valoración.
También te recomendamos…







DC & MOTORREDUCTORES




EQUIPO DE LABORATORIO




DESTACADAS

ACCESORIOS

DC & MOTORREDUCTORES


DC & MOTORREDUCTORES

DC & MOTORREDUCTORES








DC & MOTORREDUCTORES





EQUIPO DE LABORATORIO


DC & MOTORREDUCTORES










DC & MOTORREDUCTORES




Productos relacionados







DC & MOTORREDUCTORES


DC & MOTORREDUCTORES

DC & MOTORREDUCTORES


Valoraciones
No hay valoraciones aún.