-
×
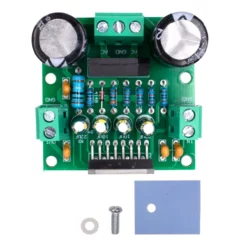 TDA7294 Amplificador de Audio Mono 100W
1 × $ 138.00
TDA7294 Amplificador de Audio Mono 100W
1 × $ 138.00 -
×
 Espuma Limpiadora para Equipos Electrónicos 454 ml SILIMPO
2 × $ 99.00
Espuma Limpiadora para Equipos Electrónicos 454 ml SILIMPO
2 × $ 99.00 -
×
 Limpiador de Pantallas 170 ml COMPUSTAT
1 × $ 79.00
Limpiador de Pantallas 170 ml COMPUSTAT
1 × $ 79.00 -
×
 UNIT Kit Mega 2560 con 31 Practicas
1 × $ 849.00
UNIT Kit Mega 2560 con 31 Practicas
1 × $ 849.00 -
×
 TTP223B Sensor Capacitivo Touch - UNIT DevLab
1 × $ 29.00
TTP223B Sensor Capacitivo Touch - UNIT DevLab
1 × $ 29.00 -
×
 UNIT DualMCU ONE ESP32 + RP2040
1 × $ 269.00
UNIT DualMCU ONE ESP32 + RP2040
1 × $ 269.00 -
×
 Limpiador Electrónico en Aerosol 454 ml SILIJET E-7 Plus
2 × $ 169.00
Limpiador Electrónico en Aerosol 454 ml SILIJET E-7 Plus
2 × $ 169.00 -
×
 CAU-118 Punta Conica para Cautin CAU-105 y CAU-115
3 × $ 16.00
CAU-118 Punta Conica para Cautin CAU-105 y CAU-115
3 × $ 16.00 -
×
 Sensor de Gestos y Detección de Rostros con AI SEN0626
1 × $ 445.00
Sensor de Gestos y Detección de Rostros con AI SEN0626
1 × $ 445.00 -
×
 PULSAR ESP32 H2 BLE5 Thread Zigbee– UNIT DevLab
1 × $ 159.00
PULSAR ESP32 H2 BLE5 Thread Zigbee– UNIT DevLab
1 × $ 159.00 -
×
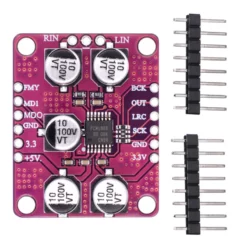 PCM1808 Decodificador de Audio Estereo ADC 99dB SNR 24 Bits
1 × $ 71.00
PCM1808 Decodificador de Audio Estereo ADC 99dB SNR 24 Bits
1 × $ 71.00 -
×
 46205 Clavija Industrial Plástica Aterrizada Volteck
1 × $ 20.00
46205 Clavija Industrial Plástica Aterrizada Volteck
1 × $ 20.00 -
×
 Puntas para Multímetro de 1000V 10A
1 × $ 29.00
Puntas para Multímetro de 1000V 10A
1 × $ 29.00 -
×
 1002 HiFi Amplificador Bluetooth Estereo 100W
2 × $ 593.00
1002 HiFi Amplificador Bluetooth Estereo 100W
2 × $ 593.00 -
×
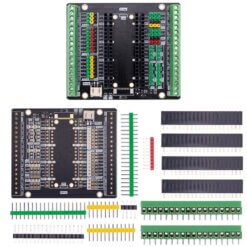 UNIT Placa de Expansión para Raspberry Pi Pico
1 × $ 79.00
UNIT Placa de Expansión para Raspberry Pi Pico
1 × $ 79.00 -
×
 Eliminador 5V 3A USB C
1 × $ 65.00
Eliminador 5V 3A USB C
1 × $ 65.00 -
×
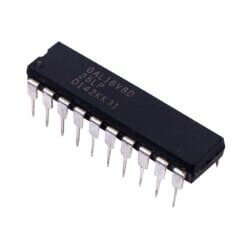 GAL16V8D-25LP Arreglo Lógico Programable DIP-20
1 × $ 58.00
GAL16V8D-25LP Arreglo Lógico Programable DIP-20
1 × $ 58.00 -
×
 A1 Mini Bambu Lab Impresora 3D
1 × $ 5,179.00
A1 Mini Bambu Lab Impresora 3D
1 × $ 5,179.00 -
×
 HT-PD27W-US Eliminador 27W USB Tipo C PD para Raspberry Pi 5
1 × $ 179.00
HT-PD27W-US Eliminador 27W USB Tipo C PD para Raspberry Pi 5
1 × $ 179.00 -
×
 RM102 Multímetro Digital Autorango RICHMETERS
1 × $ 430.00
RM102 Multímetro Digital Autorango RICHMETERS
1 × $ 430.00
Puede que estés interesado en…
-
Add
 G6K-2G-Y-TR Relevador de 2 Canales 5V - UNIT DevLab
$ 59.00
G6K-2G-Y-TR Relevador de 2 Canales 5V - UNIT DevLab
$ 59.00 -
Add
 Módulo Zumbador Pasivo 80 dB - UNIT DevLab
$ 19.00
Módulo Zumbador Pasivo 80 dB - UNIT DevLab
$ 19.00 -
Add
 CAU-115A Cautin Tipo Lapiz de 35W 127V con Accesorios
$ 159.00
CAU-115A Cautin Tipo Lapiz de 35W 127V con Accesorios
$ 159.00 -
Add
 Sonoff NSPanel Panel de Control Inteligente Pro-120
$ 1,852.00
Sonoff NSPanel Panel de Control Inteligente Pro-120
$ 1,852.00 -
Add
 Sonoff MINI D Interruptor Inteligente Wi-Fi
$ 343.00
Sonoff MINI D Interruptor Inteligente Wi-Fi
$ 343.00


















Valoraciones
No hay valoraciones aún.