-
×
 2SA1012 Transistor PNP 5A 50V
1 × $ 6.27
2SA1012 Transistor PNP 5A 50V
1 × $ 6.27 -
×
 Limpiador Electrónico en Aerosol 454 ml SILIJET E-7 Plus
2 × $ 169.00
Limpiador Electrónico en Aerosol 454 ml SILIJET E-7 Plus
2 × $ 169.00 -
×
 L298N Modulo Driver Motor A pasos
1 × $ 47.00
L298N Modulo Driver Motor A pasos
1 × $ 47.00 -
×
 74HC164M/TR Registro 8 bits
1 × $ 2.12
74HC164M/TR Registro 8 bits
1 × $ 2.12 -
×
 Shield Display TFT 2.4" Touch para Arduino Uno Mega
1 × $ 182.00
Shield Display TFT 2.4" Touch para Arduino Uno Mega
1 × $ 182.00 -
×
 Pelacables Autoajustable con Cortadora de Cable y Crimpado de Terminales
1 × $ 184.00
Pelacables Autoajustable con Cortadora de Cable y Crimpado de Terminales
1 × $ 184.00 -
×
 74HC595 Registro de Desplazamiento SN74HC595N
1 × $ 7.00
74HC595 Registro de Desplazamiento SN74HC595N
1 × $ 7.00 -
×
 MMBT3904 Transistor NPN 200mA 40V
1 × $ 2.00
MMBT3904 Transistor NPN 200mA 40V
1 × $ 2.00 -
×
 Nema 23 57BYGH56 Motor a Pasos 3A 120 Ncm
1 × $ 296.00
Nema 23 57BYGH56 Motor a Pasos 3A 120 Ncm
1 × $ 296.00 -
×
 Toallitas Húmedas para Limpieza de Equipos Electrónicos 30pcs COMPUTOALLAS
1 × $ 59.00
Toallitas Húmedas para Limpieza de Equipos Electrónicos 30pcs COMPUTOALLAS
1 × $ 59.00 -
×
 PMBT3906,215 Transistor PNP 200mA 40V
1 × $ 0.50
PMBT3906,215 Transistor PNP 200mA 40V
1 × $ 0.50 -
×
 MMBT5401 Transistor PNP 600mA 150V
1 × $ 2.00
MMBT5401 Transistor PNP 600mA 150V
1 × $ 2.00 -
×
 S9018 Transistor NPN 50mA 15V
1 × $ 0.79
S9018 Transistor NPN 50mA 15V
1 × $ 0.79 -
×
 S9015 Transistor PNP 100mA 45V
1 × $ 2.00
S9015 Transistor PNP 100mA 45V
1 × $ 2.00 -
×
 WPT2E33-3/TR Transistor PNP 3A 30V
1 × $ 1.61
WPT2E33-3/TR Transistor PNP 3A 30V
1 × $ 1.61 -
×
 S9014 Transistor NPN 100mA 45V
1 × $ 2.00
S9014 Transistor NPN 100mA 45V
1 × $ 2.00 -
×
 Nema 23 Motor a Pasos 57BYG250C 3A 180 Ncm
1 × $ 397.00
Nema 23 Motor a Pasos 57BYG250C 3A 180 Ncm
1 × $ 397.00 -
×
 LED Blanco SMD 0805 NCD0805W1
1 × $ 2.00
LED Blanco SMD 0805 NCD0805W1
1 × $ 2.00 -
×
 BMS 3S 10A Balanceador Carga de Baterias
1 × $ 36.00
BMS 3S 10A Balanceador Carga de Baterias
1 × $ 36.00 -
×
 Kit Conectores LT41 de Empalme Rápido 75pcs
2 × $ 208.00
Kit Conectores LT41 de Empalme Rápido 75pcs
2 × $ 208.00 -
×
 Kit 100 LED SMD 0603 5 Colores
1 × $ 38.00
Kit 100 LED SMD 0603 5 Colores
1 × $ 38.00 -
×
 XLG-75-12-A Fuente Conmutada 12V 5A IP67 MEAN WELL
1 × $ 576.00
XLG-75-12-A Fuente Conmutada 12V 5A IP67 MEAN WELL
1 × $ 576.00 -
×
 Shield Display LCD 16x2 con Teclado
1 × $ 92.00
Shield Display LCD 16x2 con Teclado
1 × $ 92.00 -
×
 Terminal Dupont Hembra
1 × $ 1.00
Terminal Dupont Hembra
1 × $ 1.00 -
×
 XIAO Matriz RGB 6x10 WS2812B
1 × $ 127.00
XIAO Matriz RGB 6x10 WS2812B
1 × $ 127.00 -
×
 HW-070 Control de Velocidad PWM 5V-16V 10A
1 × $ 27.00
HW-070 Control de Velocidad PWM 5V-16V 10A
1 × $ 27.00 -
×
 Shield Multifuncional 9 en 1 Compatible Arduino
1 × $ 126.00
Shield Multifuncional 9 en 1 Compatible Arduino
1 × $ 126.00 -
×
 Push Button 4 pines MicroSwitch
2 × $ 1.00
Push Button 4 pines MicroSwitch
2 × $ 1.00 -
×
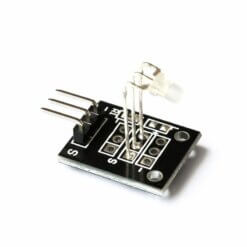
 LED Bicolor 5mm KY-011
1 × $ 7.31
LED Bicolor 5mm KY-011
1 × $ 7.31
Puede que estés interesado en…
-
Add
 Limpiador Dieléctrico para Circuitos y Tarjetas Electrónicas 454 ml COMPUKLIN
$ 189.00
Limpiador Dieléctrico para Circuitos y Tarjetas Electrónicas 454 ml COMPUKLIN
$ 189.00 -
Add
 Espuma Limpiadora para Equipos Electrónicos 454 ml SILIMPO
$ 99.00
Espuma Limpiadora para Equipos Electrónicos 454 ml SILIMPO
$ 99.00 -
Add
 Congelante Detector de Falla para Circuitos Electrónicos 170 ml SILIJET E-3
$ 109.00
Congelante Detector de Falla para Circuitos Electrónicos 170 ml SILIJET E-3
$ 109.00 -
Add
 Limpiador y Lubricante para Equipos Electrónicos en Aerosol 170 ml SILIJET E-PLUS
$ 89.00
Limpiador y Lubricante para Equipos Electrónicos en Aerosol 170 ml SILIJET E-PLUS
$ 89.00 -
Add
 Limpiador de Pantallas 170 ml COMPUSTAT
$ 79.00
Limpiador de Pantallas 170 ml COMPUSTAT
$ 79.00















Valoraciones
No hay valoraciones aún.