-
×
 RG6-305 Cable Coaxial 1m 75 Ohms C/50% Malla
1 × $ 6.00
RG6-305 Cable Coaxial 1m 75 Ohms C/50% Malla
1 × $ 6.00 -
×
 Control Remoto Inalambrico Rx y Tx 315MHz IC2262 2272 4 Canales
1 × $ 74.00
Control Remoto Inalambrico Rx y Tx 315MHz IC2262 2272 4 Canales
1 × $ 74.00 -
×
 Placa de Supresion de Interferencia 0-50V 4A EMI
1 × $ 48.00
Placa de Supresion de Interferencia 0-50V 4A EMI
1 × $ 48.00 -
×
 Espejo Reflectante 20x3mm para Máquina Láser CO2
1 × $ 183.00
Espejo Reflectante 20x3mm para Máquina Láser CO2
1 × $ 183.00 -
×
 Kit Robotuga STEAM
1 × $ 220.00
Kit Robotuga STEAM
1 × $ 220.00 -
×
 TEMT600 Sensor de Luz Ambiental – UNIT DevLab
1 × $ 39.00
TEMT600 Sensor de Luz Ambiental – UNIT DevLab
1 × $ 39.00 -
×
 HDP180V8S Fuente de Alimentación 0-80V 8A
2 × $ 4,763.00
HDP180V8S Fuente de Alimentación 0-80V 8A
2 × $ 4,763.00 -
×
 UNIT MP34DT05TR-A Módulo Micrófono PDM
1 × $ 64.00
UNIT MP34DT05TR-A Módulo Micrófono PDM
1 × $ 64.00 -
×
 DP-366D Desoldador de Succión
1 × $ 49.00
DP-366D Desoldador de Succión
1 × $ 49.00 -
×
 Set de Pinzas con Punta de Cerámica
1 × $ 113.00
Set de Pinzas con Punta de Cerámica
1 × $ 113.00 -
×
 NanoKVM Lite IP-KVM RISC-V
1 × $ 1,299.00
NanoKVM Lite IP-KVM RISC-V
1 × $ 1,299.00 -
×
 Módulo WS28B20-1010 Matriz 8x16 LED RGB - UNIT DevLab
1 × $ 119.00
Módulo WS28B20-1010 Matriz 8x16 LED RGB - UNIT DevLab
1 × $ 119.00 -
×
 Pulsera Antiestática Con Correa Ajustable Y Caiman
1 × $ 29.00
Pulsera Antiestática Con Correa Ajustable Y Caiman
1 × $ 29.00 -
×
 PT100 Sensor de Temperatura RTD 2 Hilos
1 × $ 45.00
PT100 Sensor de Temperatura RTD 2 Hilos
1 × $ 45.00 -
×
 Kit Robot Móvil con Garra G8 + Control Joystick
1 × $ 6,490.00
Kit Robot Móvil con Garra G8 + Control Joystick
1 × $ 6,490.00 -
×
 Kit Roboracer STEAM
1 × $ 220.00
Kit Roboracer STEAM
1 × $ 220.00 -
×
 KBPC2506 Puente Rectificador 25A 600V
1 × $ 24.00
KBPC2506 Puente Rectificador 25A 600V
1 × $ 24.00 -
×
 UNIT Touchdot ESP32-S3 WiFi BT
1 × $ 179.00
UNIT Touchdot ESP32-S3 WiFi BT
1 × $ 179.00 -
×
 Kit Extrusor MK8 para Impresora 3D Actualización
1 × $ 152.00
Kit Extrusor MK8 para Impresora 3D Actualización
1 × $ 152.00 -
×
 Anemómetro RS485 Sensor de Velocidad del Viento SEN0483
1 × $ 1,147.00
Anemómetro RS485 Sensor de Velocidad del Viento SEN0483
1 × $ 1,147.00 -
×
 Sonoff MINIR4M Switch WiFi
1 × $ 236.00
Sonoff MINIR4M Switch WiFi
1 × $ 236.00 -
×
 Gravity Kit de 37 Sensores Compatibles con Arduino KIT0150
1 × $ 3,082.00
Gravity Kit de 37 Sensores Compatibles con Arduino KIT0150
1 × $ 3,082.00 -
×
 MUL-281 Multímetro Profesional RMS con Detector de Voltaje
1 × $ 299.00
MUL-281 Multímetro Profesional RMS con Detector de Voltaje
1 × $ 299.00 -
×
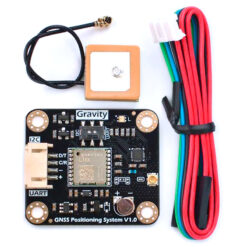 TEL0157 Receptor BeiDou GNSS GPS I2C y UART
1 × $ 410.00
TEL0157 Receptor BeiDou GNSS GPS I2C y UART
1 × $ 410.00 -
×
 Kit 660 Resistencias SMD 0603 33 Valores
1 × $ 93.00
Kit 660 Resistencias SMD 0603 33 Valores
1 × $ 93.00 -
×
 Probador USB Tipo-C Multifunción 10 en 1
1 × $ 194.00
Probador USB Tipo-C Multifunción 10 en 1
1 × $ 194.00
Puede que estés interesado en…
-
Add
 Pasta Limpiadora para Puntas de Cautín 6g
$ 34.00
Pasta Limpiadora para Puntas de Cautín 6g
$ 34.00 -
Add
 TTP223B Sensor Capacitivo Touch - UNIT DevLab
$ 29.00
TTP223B Sensor Capacitivo Touch - UNIT DevLab
$ 29.00 -
Add
 CAU-115A Cautin Tipo Lapiz de 35W 127V con Accesorios
$ 159.00
CAU-115A Cautin Tipo Lapiz de 35W 127V con Accesorios
$ 159.00 -
Add
 HB-019 Desoldador de Succión Eléctrico 36W 110V
$ 139.00
HB-019 Desoldador de Succión Eléctrico 36W 110V
$ 139.00 -
Add
 Kit Pinza de Compresión para Cable Coaxial RG59/RG6 con Pelador Giratorio + 20 Conectores
$ 179.00
Kit Pinza de Compresión para Cable Coaxial RG59/RG6 con Pelador Giratorio + 20 Conectores
$ 179.00











Valoraciones
No hay valoraciones aún.