-
×
 BC547B Transistor BJT NPN TO-92 45V
1 × $ 1.00
BC547B Transistor BJT NPN TO-92 45V
1 × $ 1.00 -
×
 TIP30C Transistor PNP -100V -1A TO-220C
1 × $ 14.00
TIP30C Transistor PNP -100V -1A TO-220C
1 × $ 14.00 -
×
 Limpiador Electrónico en Aerosol 454 ml SILIJET E-7 Plus
1 × $ 169.00
Limpiador Electrónico en Aerosol 454 ml SILIJET E-7 Plus
1 × $ 169.00 -
×
 Toallitas Húmedas para Limpieza de Equipos Electrónicos 30pcs COMPUTOALLAS
1 × $ 59.00
Toallitas Húmedas para Limpieza de Equipos Electrónicos 30pcs COMPUTOALLAS
1 × $ 59.00 -
×
 TE-613 Tapete Silicon Térmico 35x25cm
1 × $ 113.00
TE-613 Tapete Silicon Térmico 35x25cm
1 × $ 113.00 -
×
 Alicates de Pico de Pato Multifuncionales
1 × $ 117.00
Alicates de Pico de Pato Multifuncionales
1 × $ 117.00 -
×
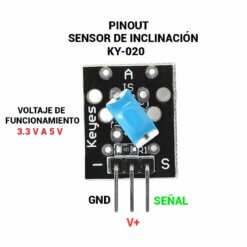
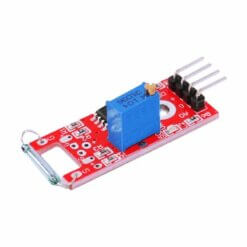
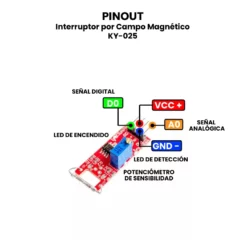
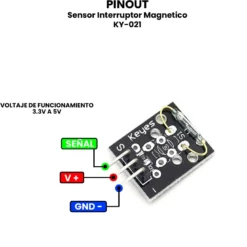
 Sensor Interruptor Magnético KY-021
1 × $ 15.00
Sensor Interruptor Magnético KY-021
1 × $ 15.00
Puede que estés interesado en…
-
Add
 Limpiador Dieléctrico para Circuitos y Tarjetas Electrónicas 454 ml COMPUKLIN
$ 189.00
Limpiador Dieléctrico para Circuitos y Tarjetas Electrónicas 454 ml COMPUKLIN
$ 189.00 -
Add
 Espuma Limpiadora para Equipos Electrónicos 454 ml SILIMPO
$ 99.00
Espuma Limpiadora para Equipos Electrónicos 454 ml SILIMPO
$ 99.00 -
Add
 Congelante Detector de Falla para Circuitos Electrónicos 170 ml SILIJET E-3
$ 109.00
Congelante Detector de Falla para Circuitos Electrónicos 170 ml SILIJET E-3
$ 109.00 -
Add
 Limpiador y Lubricante para Equipos Electrónicos en Aerosol 170 ml SILIJET E-PLUS
$ 89.00
Limpiador y Lubricante para Equipos Electrónicos en Aerosol 170 ml SILIJET E-PLUS
$ 89.00 -
Add
 Limpiador de Pantallas 170 ml COMPUSTAT
$ 79.00
Limpiador de Pantallas 170 ml COMPUSTAT
$ 79.00












Valoraciones
No hay valoraciones aún.