-
×
 Kit de Transistores TO-92 180 Piezas 18 Valores
1 × $ 69.00
Kit de Transistores TO-92 180 Piezas 18 Valores
1 × $ 69.00 -
×
 LQH43CN4R7M03L Inductor de Ferrita 4.7uH 750mA
1 × $ 5.34
LQH43CN4R7M03L Inductor de Ferrita 4.7uH 750mA
1 × $ 5.34 -
×
 Estación de Soldadura con Brazos Flexibles
1 × $ 728.00
Estación de Soldadura con Brazos Flexibles
1 × $ 728.00 -
×
 74LS47 Decodificador TTL SN74LS47N
1 × $ 13.00
74LS47 Decodificador TTL SN74LS47N
1 × $ 13.00 -
×
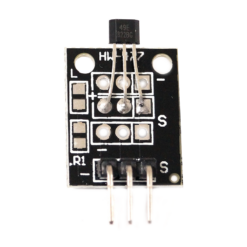
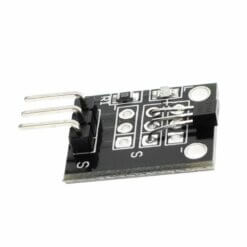 Sensor Magnetico Digital (Efecto Hall) KY-003
1 × $ 14.00
Sensor Magnetico Digital (Efecto Hall) KY-003
1 × $ 14.00 -
×
 B0540W-7-F Schottky 40V 500mA SMD
1 × $ 5.50
B0540W-7-F Schottky 40V 500mA SMD
1 × $ 5.50 -
×
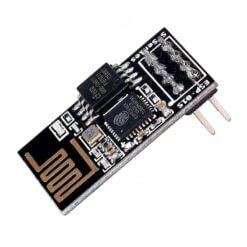 ESP-01S Módulo WiFi ESP8266
1 × $ 52.00
ESP-01S Módulo WiFi ESP8266
1 × $ 52.00 -
×
 Pasta Limpiadora para Puntas de Cautín 6g
1 × $ 34.00
Pasta Limpiadora para Puntas de Cautín 6g
1 × $ 34.00
Puede que estés interesado en…
-
Add
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto
 Soldadura en Pasta Mechanic 60 /200/ 500 g
Rango de precios: desde $ 147.00 hasta $ 840.00
Soldadura en Pasta Mechanic 60 /200/ 500 g
Rango de precios: desde $ 147.00 hasta $ 840.00 -
Add
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto
 Tinta UV para PCB Verde / Rojo / Azul / Negro / Blanco
Rango de precios: desde $ 45.00 hasta $ 55.00
Tinta UV para PCB Verde / Rojo / Azul / Negro / Blanco
Rango de precios: desde $ 45.00 hasta $ 55.00 -
Add
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto
 UNO R4 Placa de Desarrollo USB Tipo C WiFi ESP32 / Mínima
Rango de precios: desde $ 193.00 hasta $ 326.00
UNO R4 Placa de Desarrollo USB Tipo C WiFi ESP32 / Mínima
Rango de precios: desde $ 193.00 hasta $ 326.00 -
Add
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto
 UNO R3 SMD Compatible con Arduino Tipo C / MicroUSB
$ 96.00
UNO R3 SMD Compatible con Arduino Tipo C / MicroUSB
$ 96.00 -
Add
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto
 Alambre para Protoboard 24AWG 200m
Rango de precios: desde $ 314.00 hasta $ 349.00
Alambre para Protoboard 24AWG 200m
Rango de precios: desde $ 314.00 hasta $ 349.00



















Valoraciones
No hay valoraciones aún.