-
×
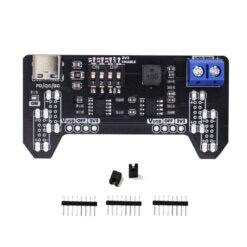 Fuente para Protoboard con Señuelo de Carga UNIT
2 × $ 129.00
Fuente para Protoboard con Señuelo de Carga UNIT
2 × $ 129.00 -
×
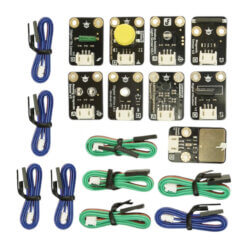 Gravity Kit de 9 Sensores Compatibles con Arduino DFR0018
1 × $ 601.00
Gravity Kit de 9 Sensores Compatibles con Arduino DFR0018
1 × $ 601.00 -
×
 ESP32-D0WD-V3 SMD
1 × $ 74.00
ESP32-D0WD-V3 SMD
1 × $ 74.00 -
×
 Conector Estéreo de 3.5mm 90 grados Niquelado Negro
1 × $ 16.00
Conector Estéreo de 3.5mm 90 grados Niquelado Negro
1 × $ 16.00 -
×
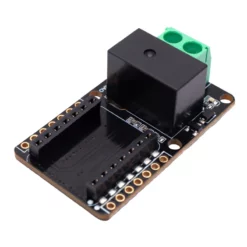 Rele de 1 Canal para Tarjetas XIAO
1 × $ 82.00
Rele de 1 Canal para Tarjetas XIAO
1 × $ 82.00 -
×
 CAU-118 Punta Conica para Cautin CAU-105 y CAU-115
1 × $ 16.00
CAU-118 Punta Conica para Cautin CAU-105 y CAU-115
1 × $ 16.00 -
×
 Raspberry Pi Pico 2 W RP2350
1 × $ 249.00
Raspberry Pi Pico 2 W RP2350
1 × $ 249.00 -
×
 Limpiador Electrónico en Aerosol 454 ml SILIJET E-7 Plus
1 × $ 169.00
Limpiador Electrónico en Aerosol 454 ml SILIJET E-7 Plus
1 × $ 169.00 -
×
 Arduino UNO R4 Minima ABX00080
1 × $ 409.00
Arduino UNO R4 Minima ABX00080
1 × $ 409.00 -
×
 UNIT Pulsar ESP32-C6
1 × $ 189.00
UNIT Pulsar ESP32-C6
1 × $ 189.00 -
×
 TCC0603COG2R2C500CT Capacitor Cerámico 0603 2.2pF 50V
1 × $ 0.14
TCC0603COG2R2C500CT Capacitor Cerámico 0603 2.2pF 50V
1 × $ 0.14 -
×
 Soldador de Gas Tipo Bolígrafo con Accesorios
1 × $ 290.00
Soldador de Gas Tipo Bolígrafo con Accesorios
1 × $ 290.00 -
×
 Flux Limpiador para Soldar 250 ML
1 × $ 117.00
Flux Limpiador para Soldar 250 ML
1 × $ 117.00 -
×
 Clip Pin Universal de IC
1 × $ 211.00
Clip Pin Universal de IC
1 × $ 211.00 -
×
 Pasta Limpiadora para Puntas de Cautín 6g
1 × $ 34.00
Pasta Limpiadora para Puntas de Cautín 6g
1 × $ 34.00 -
×
 Inductor de Ferrita 2.2uH 1.8A CD32YP0302-2R2M
1 × $ 3.52
Inductor de Ferrita 2.2uH 1.8A CD32YP0302-2R2M
1 × $ 3.52 -
×
 Limpiador y Lubricante para Equipos Electrónicos en Aerosol 170 ml SILIJET E-PLUS
1 × $ 89.00
Limpiador y Lubricante para Equipos Electrónicos en Aerosol 170 ml SILIJET E-PLUS
1 × $ 89.00 -
×
 HDP180V8S Fuente de Alimentación 0-80V 8A
1 × $ 4,763.00
HDP180V8S Fuente de Alimentación 0-80V 8A
1 × $ 4,763.00
Puede que estés interesado en…
-
Add
 CAU-115A Cautin Tipo Lapiz de 35W 127V con Accesorios
$ 159.00
CAU-115A Cautin Tipo Lapiz de 35W 127V con Accesorios
$ 159.00 -
Add
 Toallitas Húmedas para Limpieza de Equipos Electrónicos 30pcs COMPUTOALLAS
$ 59.00
Toallitas Húmedas para Limpieza de Equipos Electrónicos 30pcs COMPUTOALLAS
$ 59.00 -
Add
 Limpiador Dieléctrico para Circuitos y Tarjetas Electrónicas 454 ml COMPUKLIN
$ 189.00
Limpiador Dieléctrico para Circuitos y Tarjetas Electrónicas 454 ml COMPUKLIN
$ 189.00 -
Add
 Espuma Limpiadora para Equipos Electrónicos 454 ml SILIMPO
$ 99.00
Espuma Limpiadora para Equipos Electrónicos 454 ml SILIMPO
$ 99.00 -
Add
 Congelante Detector de Falla para Circuitos Electrónicos 170 ml SILIJET E-3
$ 109.00
Congelante Detector de Falla para Circuitos Electrónicos 170 ml SILIJET E-3
$ 109.00



















Valoraciones
No hay valoraciones aún.