-
×
 TTP223B Sensor Capacitivo Touch - UNIT DevLab
1 × $ 29.00
TTP223B Sensor Capacitivo Touch - UNIT DevLab
1 × $ 29.00 -
×
 Conector de Batería Tipo T
1 × $ 13.00
Conector de Batería Tipo T
1 × $ 13.00 -
×
 Flux Limpiador para Soldar 250 ML
1 × $ 117.00
Flux Limpiador para Soldar 250 ML
1 × $ 117.00 -
×
 CAU-115A Cautin Tipo Lapiz de 35W 127V con Accesorios
2 × $ 159.00
CAU-115A Cautin Tipo Lapiz de 35W 127V con Accesorios
2 × $ 159.00 -
×
 Cargador de Carga Rápida 40W US + Cable Tipo C
1 × $ 147.00
Cargador de Carga Rápida 40W US + Cable Tipo C
1 × $ 147.00 -
×
 Limpiador de Pantallas 170 ml COMPUSTAT
1 × $ 79.00
Limpiador de Pantallas 170 ml COMPUSTAT
1 × $ 79.00 -
×
 KBPC2506 Puente Rectificador 25A 600V
1 × $ 24.00
KBPC2506 Puente Rectificador 25A 600V
1 × $ 24.00 -
×
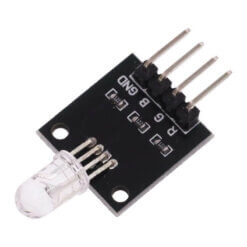 Led RGB Catodo Comun KY-016
1 × $ 14.00
Led RGB Catodo Comun KY-016
1 × $ 14.00 -
×
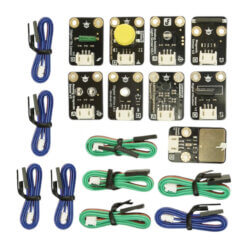 Gravity Kit de 9 Sensores Compatibles con Arduino DFR0018
1 × $ 601.00
Gravity Kit de 9 Sensores Compatibles con Arduino DFR0018
1 × $ 601.00 -
×
 Transformador 18VC/T 1A con Tap Central
1 × $ 219.00
Transformador 18VC/T 1A con Tap Central
1 × $ 219.00 -
×
 Clip Pin Universal de IC
1 × $ 211.00
Clip Pin Universal de IC
1 × $ 211.00 -
×
 TDA7297 Amplificador Audio de Doble Canal 12V DC 15W
1 × $ 91.00
TDA7297 Amplificador Audio de Doble Canal 12V DC 15W
1 × $ 91.00 -
×
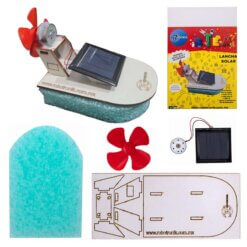 Kit Lancha Solar STEM
1 × $ 252.00
Kit Lancha Solar STEM
1 × $ 252.00 -
×
 Kit Reloj Electrónico Digital AT89C2051 4 Bits
1 × $ 83.00
Kit Reloj Electrónico Digital AT89C2051 4 Bits
1 × $ 83.00 -
×
 46204 Clavija Industrial Plástica Volteck
1 × $ 17.00
46204 Clavija Industrial Plástica Volteck
1 × $ 17.00 -
×
 Puntas para Multímetro de 1000V 10A
1 × $ 29.00
Puntas para Multímetro de 1000V 10A
1 × $ 29.00 -
×
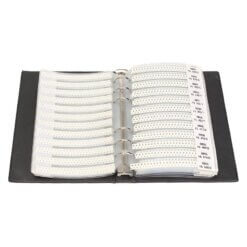 Catálogo Resistencias SMD 0805 4250 Piezas
1 × $ 368.00
Catálogo Resistencias SMD 0805 4250 Piezas
1 × $ 368.00
Puede que estés interesado en…
-
Add
 CAU-118 Punta Conica para Cautin CAU-105 y CAU-115
$ 16.00
CAU-118 Punta Conica para Cautin CAU-105 y CAU-115
$ 16.00 -
Add
 UNIT Touchdot ESP32-S3 WiFi BT
$ 179.00
UNIT Touchdot ESP32-S3 WiFi BT
$ 179.00 -
Add
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto
 GX-9877 Interruptor Tactil Unicolor/Bicolor para Espejos 12V 3A
Rango de precios: desde $ 58.00 hasta $ 65.00
GX-9877 Interruptor Tactil Unicolor/Bicolor para Espejos 12V 3A
Rango de precios: desde $ 58.00 hasta $ 65.00 -
Add
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto
 Boton Tactil Capacitivo Verde/Rojo/Azul
$ 26.00
Boton Tactil Capacitivo Verde/Rojo/Azul
$ 26.00 -
Add
 Toallitas Húmedas para Limpieza de Equipos Electrónicos 30pcs COMPUTOALLAS
$ 59.00
Toallitas Húmedas para Limpieza de Equipos Electrónicos 30pcs COMPUTOALLAS
$ 59.00


















Valoraciones
No hay valoraciones aún.