-
×
 1002 HiFi Amplificador Bluetooth Estereo 100W
1 × $ 593.00
1002 HiFi Amplificador Bluetooth Estereo 100W
1 × $ 593.00 -
×
 Zocalo ZIF 40 pines
1 × $ 24.00
Zocalo ZIF 40 pines
1 × $ 24.00 -
×
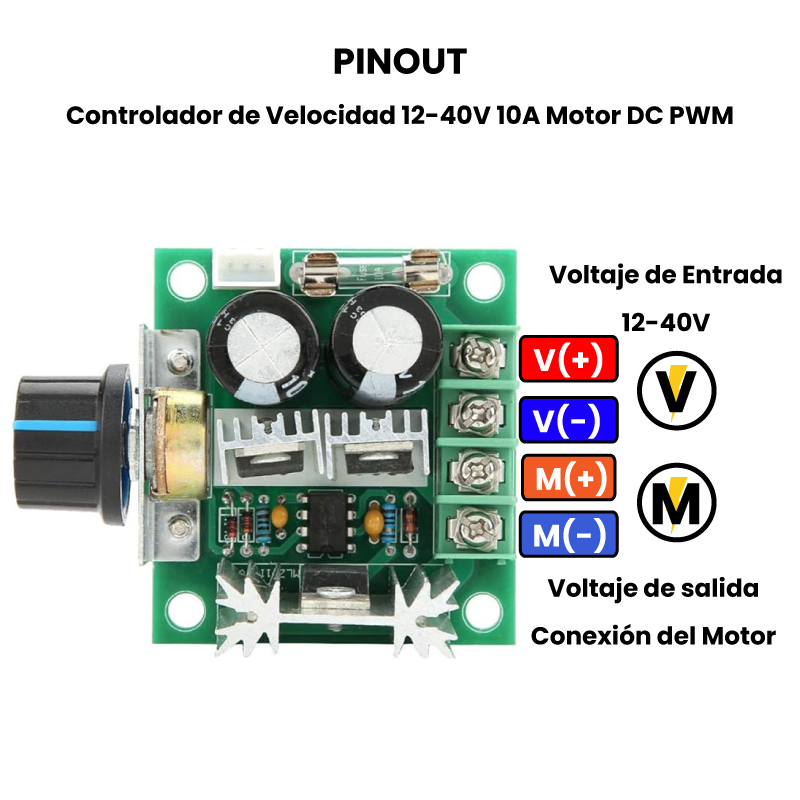
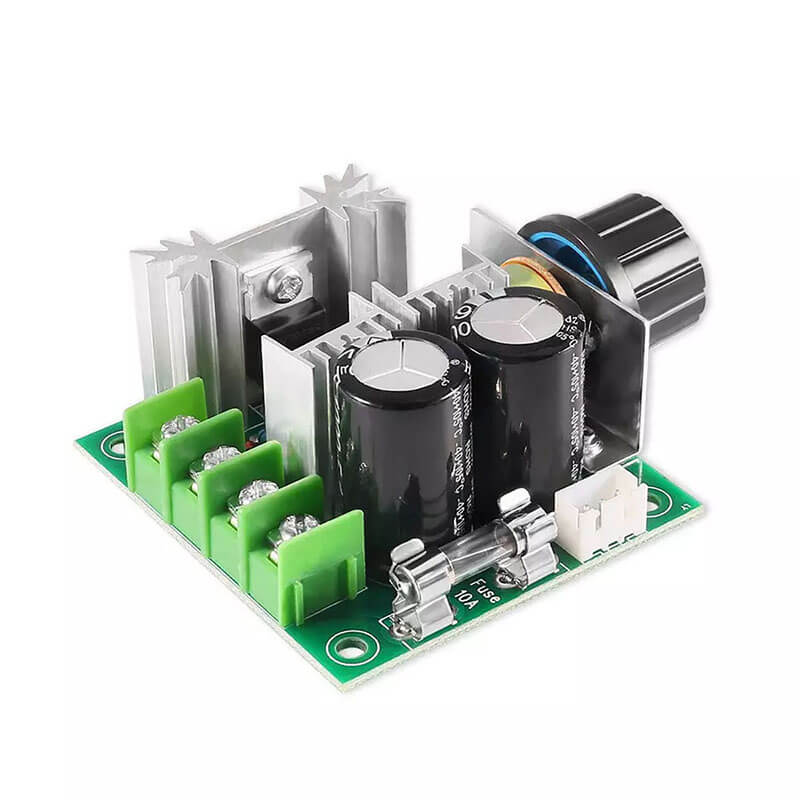
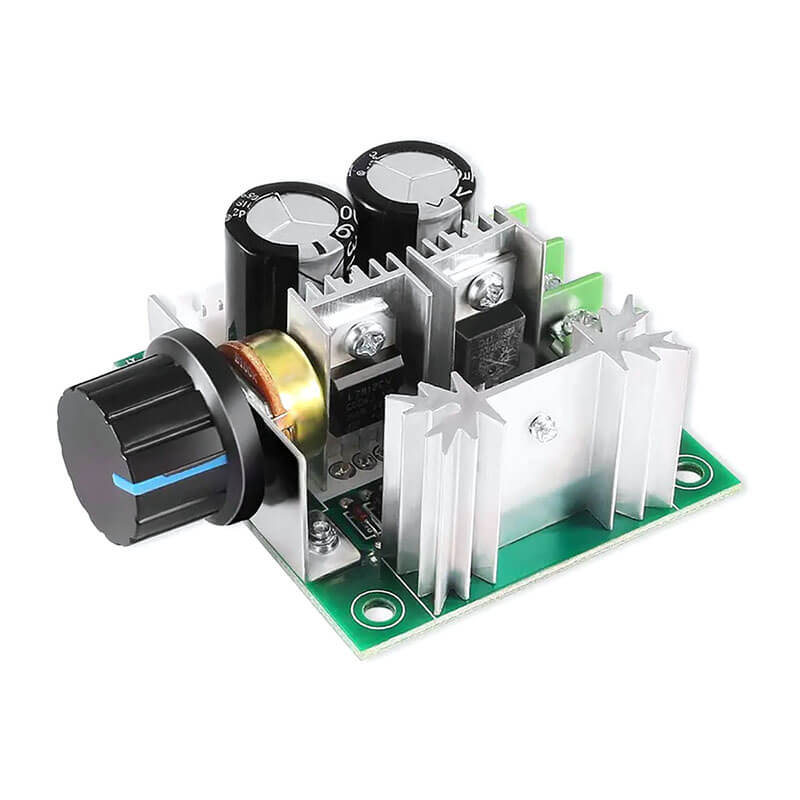
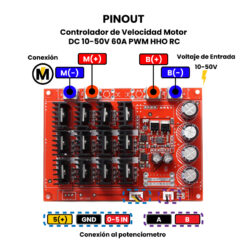
 Controlador de Velocidad 6-60V 30A Motor DC PWM
1 × $ 163.00
Controlador de Velocidad 6-60V 30A Motor DC PWM
1 × $ 163.00 -
×
 Bateria LiPo 3.7V 2500mAh 104050
1 × $ 137.00
Bateria LiPo 3.7V 2500mAh 104050
1 × $ 137.00 -
×
 Neopixel Matriz 8x8 CJMCU WS2812 5050 RGB LED
1 × $ 108.00
Neopixel Matriz 8x8 CJMCU WS2812 5050 RGB LED
1 × $ 108.00 -
×
 CP2102 Convertidor USB a TTL
1 × $ 59.00
CP2102 Convertidor USB a TTL
1 × $ 59.00 -
×
 CH340C USB a UART C84681
1 × $ 20.00
CH340C USB a UART C84681
1 × $ 20.00 -
×
 UNIT Pulsar ESP32-C6
1 × $ 189.00
UNIT Pulsar ESP32-C6
1 × $ 189.00 -
×
 Shield Display TFT 2.4" Touch para Arduino Uno Mega
1 × $ 182.00
Shield Display TFT 2.4" Touch para Arduino Uno Mega
1 × $ 182.00 -
×
 Pelador de Cables Coaxiales Giratorio
1 × $ 35.00
Pelador de Cables Coaxiales Giratorio
1 × $ 35.00 -
×
 Kit Levitador Ultrasónico 12V DC 40KHz
1 × $ 161.00
Kit Levitador Ultrasónico 12V DC 40KHz
1 × $ 161.00
Puede que estés interesado en…
-
Add
 RG6-305 Cable Coaxial 1m 75 Ohms C/50% Malla
$ 6.00
RG6-305 Cable Coaxial 1m 75 Ohms C/50% Malla
$ 6.00 -
Add
 Gravity Kit de 37 Sensores Compatibles con Arduino KIT0150
$ 3,082.00
Gravity Kit de 37 Sensores Compatibles con Arduino KIT0150
$ 3,082.00 -
Add
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto
 Cincho Negro de 19cm o 15cm 100 Piezas
Rango de precios: desde $ 28.00 hasta $ 77.00
Cincho Negro de 19cm o 15cm 100 Piezas
Rango de precios: desde $ 28.00 hasta $ 77.00 -
Add
 Adaptador de Audio Jack 3.5mm a Plug 6.3mm Estéreo
$ 13.00
Adaptador de Audio Jack 3.5mm a Plug 6.3mm Estéreo
$ 13.00 -
Add
 Mega 2560 Tarjeta de Desarrollo
$ 345.00
Mega 2560 Tarjeta de Desarrollo
$ 345.00



























Valoraciones
No hay valoraciones aún.