-
×
 ESP-01S Módulo WiFi ESP8266
1 × $ 52.00
ESP-01S Módulo WiFi ESP8266
1 × $ 52.00
Puede que estés interesado en…
-
Add
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto
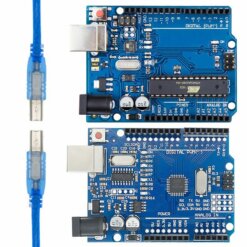
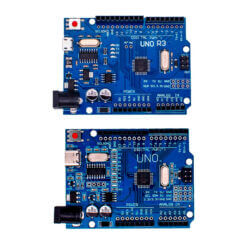
 UNO R3 SMD Compatible con Arduino Tipo C / MicroUSB
$ 96.00
UNO R3 SMD Compatible con Arduino Tipo C / MicroUSB
$ 96.00 -
Add
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto
 Alambre para Protoboard 24AWG 200m
Rango de precios: desde $ 314.00 hasta $ 349.00
Alambre para Protoboard 24AWG 200m
Rango de precios: desde $ 314.00 hasta $ 349.00 -
Add
 ESP8266EX SMD
El precio original era: $ 52.00.$ 21.18El precio actual es: $ 21.18.
ESP8266EX SMD
El precio original era: $ 52.00.$ 21.18El precio actual es: $ 21.18. -
Add
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto
 Alambre para Protoboard 1 Metro
Rango de precios: desde $ 2.00 hasta $ 4.00
Alambre para Protoboard 1 Metro
Rango de precios: desde $ 2.00 hasta $ 4.00 -
Add
 Fuente de alimentación para protoboard v2 MB-102 3.3V 5V
$ 27.00
Fuente de alimentación para protoboard v2 MB-102 3.3V 5V
$ 27.00
































Valoraciones
No hay valoraciones aún.