-
×
 Sonoff Cámara Seguridad WiFi Ethernet GK-200MP2-B
1 × $ 854.00
Sonoff Cámara Seguridad WiFi Ethernet GK-200MP2-B
1 × $ 854.00 -
×
 MQ-4 Detector de Gas Metano
1 × $ 49.00
MQ-4 Detector de Gas Metano
1 × $ 49.00 -
×
 2SA1516 Transistor PNP -180V -12A TO-3PN
1 × $ 22.00
2SA1516 Transistor PNP -180V -12A TO-3PN
1 × $ 22.00 -
×
 S-160 Tapete Magnético Antiestática 45x30cm
1 × $ 181.00
S-160 Tapete Magnético Antiestática 45x30cm
1 × $ 181.00 -
×
 A4988SETTR-T IC SMD
1 × $ 38.99
A4988SETTR-T IC SMD
1 × $ 38.99 -
×
 Módulo Zumbador Pasivo 80 dB - UNIT DevLab
1 × $ 19.00
Módulo Zumbador Pasivo 80 dB - UNIT DevLab
1 × $ 19.00 -
×
 DS1307ZN+T&R IC SMD RTC
1 × $ 28.00
DS1307ZN+T&R IC SMD RTC
1 × $ 28.00 -
×
 A3967SLBTR-T IC SMD
1 × $ 49.24
A3967SLBTR-T IC SMD
1 × $ 49.24 -
×
 Tira Header Macho L12.3 40 Pines 2.54 mm
1 × $ 26.00
Tira Header Macho L12.3 40 Pines 2.54 mm
1 × $ 26.00 -
×
 XL4016 Modulo Regulador Step Down 300W 9A
1 × $ 76.00
XL4016 Modulo Regulador Step Down 300W 9A
1 × $ 76.00 -
×
 reComputer Super J4012 Computadora Edge AI con NVIDIA Jetson Orin NX de 16 GB
1 × $ 24,599.00
reComputer Super J4012 Computadora Edge AI con NVIDIA Jetson Orin NX de 16 GB
1 × $ 24,599.00 -
×
 Espuma Limpiadora para Equipos Electrónicos 454 ml SILIMPO
1 × $ 99.00
Espuma Limpiadora para Equipos Electrónicos 454 ml SILIMPO
1 × $ 99.00
Puede que estés interesado en…
-
Add
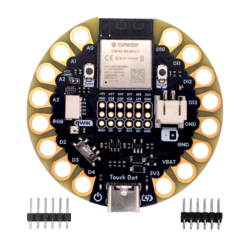
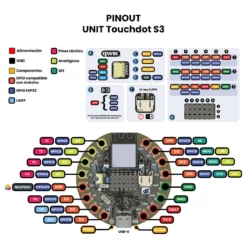
 UNIT Touchdot ESP32-S3 WiFi BT
$ 179.00
UNIT Touchdot ESP32-S3 WiFi BT
$ 179.00 -
Add
 Toallitas Húmedas para Limpieza de Equipos Electrónicos 30pcs COMPUTOALLAS
$ 59.00
Toallitas Húmedas para Limpieza de Equipos Electrónicos 30pcs COMPUTOALLAS
$ 59.00 -
Add
 Limpiador Dieléctrico para Circuitos y Tarjetas Electrónicas 454 ml COMPUKLIN
$ 189.00
Limpiador Dieléctrico para Circuitos y Tarjetas Electrónicas 454 ml COMPUKLIN
$ 189.00 -
Add
 Limpiador Electrónico en Aerosol 454 ml SILIJET E-7 Plus
$ 169.00
Limpiador Electrónico en Aerosol 454 ml SILIJET E-7 Plus
$ 169.00 -
Add
 Congelante Detector de Falla para Circuitos Electrónicos 170 ml SILIJET E-3
$ 109.00
Congelante Detector de Falla para Circuitos Electrónicos 170 ml SILIJET E-3
$ 109.00






















Valoraciones
No hay valoraciones aún.