-
×
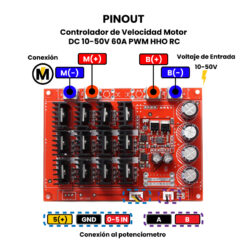
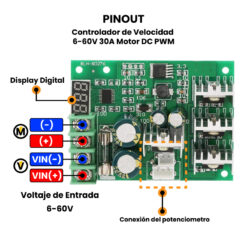
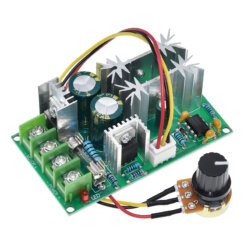
 Controlador de Velocidad 6-30V 6A Reversible Motor DC PWM
1 × $ 121.00
Controlador de Velocidad 6-30V 6A Reversible Motor DC PWM
1 × $ 121.00 -
×
 TEMT600 Sensor de Luz Ambiental – UNIT DevLab
1 × $ 39.00
TEMT600 Sensor de Luz Ambiental – UNIT DevLab
1 × $ 39.00 -
×
 XLG-150-12-A Fuente de Alimentación 12V 12.5A IP67 MEAN WELL
1 × $ 698.00
XLG-150-12-A Fuente de Alimentación 12V 12.5A IP67 MEAN WELL
1 × $ 698.00 -
×
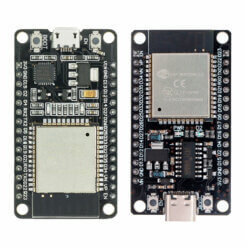
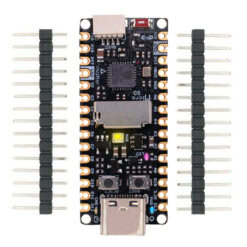 UNIT Pulsar ESP32-C6
1 × $ 189.00
UNIT Pulsar ESP32-C6
1 × $ 189.00 -
×
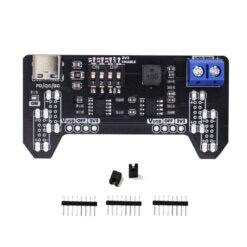 Fuente para Protoboard con Señuelo de Carga UNIT
1 × $ 129.00
Fuente para Protoboard con Señuelo de Carga UNIT
1 × $ 129.00 -
×
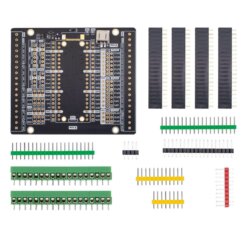
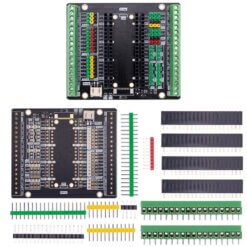 UNIT Placa de Expansión para Raspberry Pi Pico
1 × $ 79.00
UNIT Placa de Expansión para Raspberry Pi Pico
1 × $ 79.00 -
×
 Amplificador de Audio TPA3116 30W Doble Canal
1 × $ 60.95
Amplificador de Audio TPA3116 30W Doble Canal
1 × $ 60.95 -
×
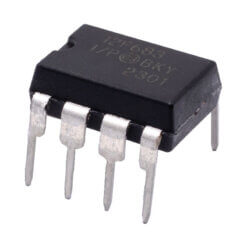 PIC12F683-I/P Microcontrolador 8bits DIP-8
1 × $ 71.00
PIC12F683-I/P Microcontrolador 8bits DIP-8
1 × $ 71.00 -
×
 LRS-150-12 Fuente Conmutada 12V 12.5A MEAN WELL
1 × $ 452.00
LRS-150-12 Fuente Conmutada 12V 12.5A MEAN WELL
1 × $ 452.00 -
×
 Estación de Soldadura con Brazos Flexibles
1 × $ 728.00
Estación de Soldadura con Brazos Flexibles
1 × $ 728.00 -
×
 46205 Clavija Industrial Plástica Aterrizada Volteck
1 × $ 20.00
46205 Clavija Industrial Plástica Aterrizada Volteck
1 × $ 20.00 -
×
 Sonoff MINIR4M Switch WiFi
1 × $ 236.00
Sonoff MINIR4M Switch WiFi
1 × $ 236.00 -
×
 Flux Limpiador para Soldar 250 ML
1 × $ 117.00
Flux Limpiador para Soldar 250 ML
1 × $ 117.00 -
×
 CAU-115A Cautin Tipo Lapiz de 35W 127V con Accesorios
1 × $ 159.00
CAU-115A Cautin Tipo Lapiz de 35W 127V con Accesorios
1 × $ 159.00 -
×
 SI4713 Modulo Transmisor FM 3-5V DC
1 × $ 172.00
SI4713 Modulo Transmisor FM 3-5V DC
1 × $ 172.00 -
×
 Espejo Reflectante 20x3mm para Máquina Láser CO2
1 × $ 183.00
Espejo Reflectante 20x3mm para Máquina Láser CO2
1 × $ 183.00 -
×
 SYB-500 Protoboard 2700 Puntos
1 × $ 149.00
SYB-500 Protoboard 2700 Puntos
1 × $ 149.00 -
×
 DP-366D Desoldador de Succión
1 × $ 49.00
DP-366D Desoldador de Succión
1 × $ 49.00 -
×
 TM1637 4 dígitos 7 segmentos
1 × $ 25.00
TM1637 4 dígitos 7 segmentos
1 × $ 25.00 -
×
 Cable Extensión DC Plug M-H 5.5x2.1mm 1m
1 × $ 44.00
Cable Extensión DC Plug M-H 5.5x2.1mm 1m
1 × $ 44.00 -
×
 Sensor de Gestos y Detección de Rostros con AI SEN0626
1 × $ 445.00
Sensor de Gestos y Detección de Rostros con AI SEN0626
1 × $ 445.00 -
×
 Gravity Kit de 37 Sensores Compatibles con Arduino KIT0150
1 × $ 3,082.00
Gravity Kit de 37 Sensores Compatibles con Arduino KIT0150
1 × $ 3,082.00 -
×
 Espuma Limpiadora para Equipos Electrónicos 454 ml SILIMPO
2 × $ 99.00
Espuma Limpiadora para Equipos Electrónicos 454 ml SILIMPO
2 × $ 99.00 -
×
 Módulo Zumbador Pasivo 80 dB - UNIT DevLab
1 × $ 19.00
Módulo Zumbador Pasivo 80 dB - UNIT DevLab
1 × $ 19.00 -
×
 Conector Estéreo de 3.5mm 90 grados Niquelado Negro
1 × $ 16.00
Conector Estéreo de 3.5mm 90 grados Niquelado Negro
1 × $ 16.00 -
×
 Sensor Magnético Analógico 49E KY-035
1 × $ 16.00
Sensor Magnético Analógico 49E KY-035
1 × $ 16.00 -
×
 Pasta Limpiadora para Puntas de Cautín 6g
1 × $ 34.00
Pasta Limpiadora para Puntas de Cautín 6g
1 × $ 34.00 -
×
 Limpiador Electrónico en Aerosol 454 ml SILIJET E-7 Plus
1 × $ 169.00
Limpiador Electrónico en Aerosol 454 ml SILIJET E-7 Plus
1 × $ 169.00 -
×
 NRF24L01 + PA + LNA Con antena
1 × $ 62.00
NRF24L01 + PA + LNA Con antena
1 × $ 62.00
Puede que estés interesado en…
-
Add
 CAU-118 Punta Conica para Cautin CAU-105 y CAU-115
$ 16.00
CAU-118 Punta Conica para Cautin CAU-105 y CAU-115
$ 16.00 -
Add
 UNIT Touchdot ESP32-S3 WiFi BT
$ 179.00
UNIT Touchdot ESP32-S3 WiFi BT
$ 179.00 -
Add
 HB-019 Desoldador de Succión Eléctrico 36W 110V
$ 139.00
HB-019 Desoldador de Succión Eléctrico 36W 110V
$ 139.00 -
Add
 Toallitas Húmedas para Limpieza de Equipos Electrónicos 30pcs COMPUTOALLAS
$ 59.00
Toallitas Húmedas para Limpieza de Equipos Electrónicos 30pcs COMPUTOALLAS
$ 59.00 -
Add
 Limpiador Dieléctrico para Circuitos y Tarjetas Electrónicas 454 ml COMPUKLIN
$ 189.00
Limpiador Dieléctrico para Circuitos y Tarjetas Electrónicas 454 ml COMPUKLIN
$ 189.00


























Valoraciones
No hay valoraciones aún.