-
×
 Kit de 100 Termistores NTC MF52AT 1k a 100k
1 × $ 119.00
Kit de 100 Termistores NTC MF52AT 1k a 100k
1 × $ 119.00 -
×
 MUL-281 Multímetro Profesional RMS con Detector de Voltaje
1 × $ 299.00
MUL-281 Multímetro Profesional RMS con Detector de Voltaje
1 × $ 299.00 -
×
 Sensor de Obstaculos KY-033
1 × $ 19.00
Sensor de Obstaculos KY-033
1 × $ 19.00 -
×
 Porta Pilas Transparente con Interruptor ON OFF
1 × $ 23.00
Porta Pilas Transparente con Interruptor ON OFF
1 × $ 23.00 -
×
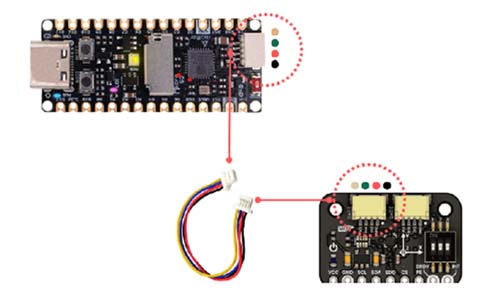
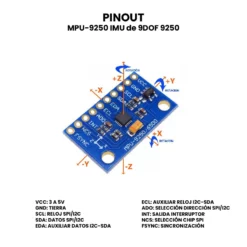
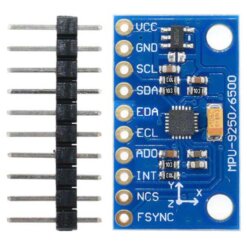 MPU-9250 IMU de 9DOF 9250
1 × $ 257.00
MPU-9250 IMU de 9DOF 9250
1 × $ 257.00
Puede que estés interesado en…
-
Add
 Puntas para Multímetro de 1000V 10A
$ 29.00
Puntas para Multímetro de 1000V 10A
$ 29.00 -
Add
 UNIT Kit UNO Básico con 13 practicas
(1) $ 249.00
UNIT Kit UNO Básico con 13 practicas
(1) $ 249.00 -
Add
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto
 XH-W3001 Controlador de Temperatura 12V/24V/110-220V
Rango de precios: desde $ 68.00 hasta $ 76.00
XH-W3001 Controlador de Temperatura 12V/24V/110-220V
Rango de precios: desde $ 68.00 hasta $ 76.00 -
Add
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto
 UNO R4 Placa de Desarrollo USB Tipo C WiFi ESP32 / Mínima
Rango de precios: desde $ 193.00 hasta $ 326.00
UNO R4 Placa de Desarrollo USB Tipo C WiFi ESP32 / Mínima
Rango de precios: desde $ 193.00 hasta $ 326.00 -
Add
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto
 UNO R3 SMD Compatible con Arduino Tipo C / MicroUSB
$ 96.00
UNO R3 SMD Compatible con Arduino Tipo C / MicroUSB
$ 96.00























Valoraciones
No hay valoraciones aún.