-
×
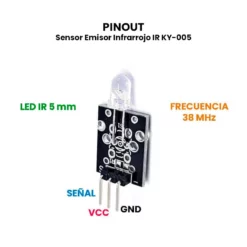
 Sensor Emisor Infrarrojo IR KY-005
1 × $ 17.00
Sensor Emisor Infrarrojo IR KY-005
1 × $ 17.00 -
×
 Led Bicolor 3mm KY-029
1 × $ 25.00
Led Bicolor 3mm KY-029
1 × $ 25.00 -
×
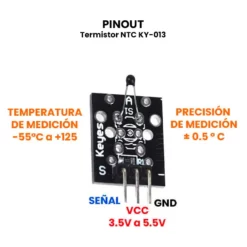
 Termistor NTC KY-013
1 × $ 14.00
Termistor NTC KY-013
1 × $ 14.00 -
×
 Sensor Ultrasónico HC-SR04
1 × $ 29.00
Sensor Ultrasónico HC-SR04
1 × $ 29.00 -
×
 Sensor de Impacto KY-031
1 × $ 17.00
Sensor de Impacto KY-031
1 × $ 17.00 -
×
 UNIT Kit ESP32 Básico con 10 practicas
1 × $ 269.00
UNIT Kit ESP32 Básico con 10 practicas
1 × $ 269.00 -
×
 Cautín de 60W 110V con Puntas Soporte y Esponja
1 × $ 124.00
Cautín de 60W 110V con Puntas Soporte y Esponja
1 × $ 124.00 -
×
 Interruptor enclavable 2 Polo 2 Tiros 5.8x5.8mm
1 × $ 4.00
Interruptor enclavable 2 Polo 2 Tiros 5.8x5.8mm
1 × $ 4.00 -
×
 Arduino UNO R4 WiFi ABX00087
1 × $ 692.00
Arduino UNO R4 WiFi ABX00087
1 × $ 692.00 -
×
 Buzzer Pasivo KY-006
1 × $ 13.00
Buzzer Pasivo KY-006
1 × $ 13.00
Puede que estés interesado en…
-
Add
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto
 Cable USB 2.0 para Datos o Alimentación
Rango de precios: desde $ 12.00 hasta $ 16.00
Cable USB 2.0 para Datos o Alimentación
Rango de precios: desde $ 12.00 hasta $ 16.00 -
Add
 UNIT DualMCU ONE ESP32 + RP2040
$ 269.00
UNIT DualMCU ONE ESP32 + RP2040
$ 269.00 -
Add
 UShieldX Shield de Expansión para Arduino UNO
$ 456.00
UShieldX Shield de Expansión para Arduino UNO
$ 456.00 -
Add
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto
 Protoboard de 400pts y 830pts Blanco o Transparente
Rango de precios: desde $ 16.00 hasta $ 44.00
Protoboard de 400pts y 830pts Blanco o Transparente
Rango de precios: desde $ 16.00 hasta $ 44.00 -
Add
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto
 UNO R4 Placa de Desarrollo USB Tipo C WiFi ESP32 / Mínima
Rango de precios: desde $ 193.00 hasta $ 326.00
UNO R4 Placa de Desarrollo USB Tipo C WiFi ESP32 / Mínima
Rango de precios: desde $ 193.00 hasta $ 326.00



























Valoraciones
No hay valoraciones aún.