-
×
 Kit Conectores LT41 de Empalme Rápido 75pcs
1 × $ 208.00
Kit Conectores LT41 de Empalme Rápido 75pcs
1 × $ 208.00 -
×
 Cargador de Carga Rápida 40W US + Cable Tipo C
1 × $ 147.00
Cargador de Carga Rápida 40W US + Cable Tipo C
1 × $ 147.00 -
×
 CAU-115A Cautin Tipo Lapiz de 35W 127V con Accesorios
2 × $ 159.00
CAU-115A Cautin Tipo Lapiz de 35W 127V con Accesorios
2 × $ 159.00 -
×
 Toallitas Húmedas para Limpieza de Equipos Electrónicos 30pcs COMPUTOALLAS
2 × $ 59.00
Toallitas Húmedas para Limpieza de Equipos Electrónicos 30pcs COMPUTOALLAS
2 × $ 59.00 -
×
 Kit Limpiador y Protector Antiestático para Pantallas 60 ml LCD CLEANER
1 × $ 99.00
Kit Limpiador y Protector Antiestático para Pantallas 60 ml LCD CLEANER
1 × $ 99.00 -
×
 Kit de 180 capacitores cerámicos
1 × $ 95.00
Kit de 180 capacitores cerámicos
1 × $ 95.00 -
×
 Limpiador Electrónico en Aerosol 454 ml SILIJET E-7 Plus
2 × $ 169.00
Limpiador Electrónico en Aerosol 454 ml SILIJET E-7 Plus
2 × $ 169.00 -
×
 Creality Ender 3 V2 Impresora 3D
1 × $ 5,322.00
Creality Ender 3 V2 Impresora 3D
1 × $ 5,322.00 -
×
 Pinzas de Microcorte 5''
1 × $ 47.00
Pinzas de Microcorte 5''
1 × $ 47.00 -
×
 Soldador de Gas Tipo Bolígrafo con Accesorios
1 × $ 290.00
Soldador de Gas Tipo Bolígrafo con Accesorios
1 × $ 290.00 -
×
 Cable Duplex STP- POT 12 AWG Blanco 1 Metro
1 × $ 24.00
Cable Duplex STP- POT 12 AWG Blanco 1 Metro
1 × $ 24.00 -
×
 Sensor Interruptor Mercurio KY-017
1 × $ 13.00
Sensor Interruptor Mercurio KY-017
1 × $ 13.00 -
×
 Limpiador de Pantallas 170 ml COMPUSTAT
3 × $ 79.00
Limpiador de Pantallas 170 ml COMPUSTAT
3 × $ 79.00 -
×
 Espuma Limpiadora para Equipos Electrónicos 454 ml SILIMPO
1 × $ 99.00
Espuma Limpiadora para Equipos Electrónicos 454 ml SILIMPO
1 × $ 99.00 -
×
 UNIT Pulsar ESP32-C6
1 × $ 189.00
UNIT Pulsar ESP32-C6
1 × $ 189.00 -
×
 Limpiador y Lubricante para Equipos Electrónicos en Aerosol 170 ml SILIJET E-PLUS
1 × $ 89.00
Limpiador y Lubricante para Equipos Electrónicos en Aerosol 170 ml SILIJET E-PLUS
1 × $ 89.00 -
×
 Congelante Detector de Falla para Circuitos Electrónicos 170 ml SILIJET E-3
1 × $ 109.00
Congelante Detector de Falla para Circuitos Electrónicos 170 ml SILIJET E-3
1 × $ 109.00 -
×
 HT-PD27W-US Eliminador 27W USB Tipo C PD para Raspberry Pi 5
1 × $ 179.00
HT-PD27W-US Eliminador 27W USB Tipo C PD para Raspberry Pi 5
1 × $ 179.00 -
×
 TEMT600 Sensor de Luz Ambiental – UNIT DevLab
1 × $ 39.00
TEMT600 Sensor de Luz Ambiental – UNIT DevLab
1 × $ 39.00 -
×
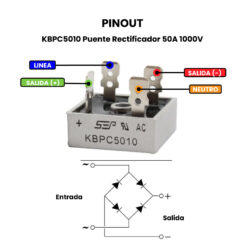
 LRS-150-12 Fuente Conmutada 12V 12.5A MEAN WELL
1 × $ 452.00
LRS-150-12 Fuente Conmutada 12V 12.5A MEAN WELL
1 × $ 452.00 -
×
 CY-15A Rueda Loca Universal de Metal
1 × $ 22.00
CY-15A Rueda Loca Universal de Metal
1 × $ 22.00 -
×
 XLG-150-12-A Fuente de Alimentación 12V 12.5A IP67 MEAN WELL
1 × $ 698.00
XLG-150-12-A Fuente de Alimentación 12V 12.5A IP67 MEAN WELL
1 × $ 698.00 -
×
 UNIT Placa de Expansión para Raspberry Pi Pico
1 × $ 79.00
UNIT Placa de Expansión para Raspberry Pi Pico
1 × $ 79.00 -
×
 LRS-200-12 Fuente Conmutada 12V 17A MEAN WELL
1 × $ 589.00
LRS-200-12 Fuente Conmutada 12V 17A MEAN WELL
1 × $ 589.00
Puede que estés interesado en…
-
Add
 CAU-118 Punta Conica para Cautin CAU-105 y CAU-115
$ 16.00
CAU-118 Punta Conica para Cautin CAU-105 y CAU-115
$ 16.00 -
Add
 Limpiador Dieléctrico para Circuitos y Tarjetas Electrónicas 454 ml COMPUKLIN
$ 189.00
Limpiador Dieléctrico para Circuitos y Tarjetas Electrónicas 454 ml COMPUKLIN
$ 189.00 -
Add
 Sensor de Gestos y Detección de Rostros con AI SEN0626
$ 445.00
Sensor de Gestos y Detección de Rostros con AI SEN0626
$ 445.00 -
Add
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto
 Sensor de Estación Meteorológica con Caja de Rejilla
Rango de precios: desde $ 558.00 hasta $ 1,309.00
Sensor de Estación Meteorológica con Caja de Rejilla
Rango de precios: desde $ 558.00 hasta $ 1,309.00 -
Add
 Fuente para Protoboard con Señuelo de Carga UNIT
$ 129.00
Fuente para Protoboard con Señuelo de Carga UNIT
$ 129.00















Valoraciones
No hay valoraciones aún.