-
×
 Eliminador 5V 3A USB C
1 × $ 65.00
Eliminador 5V 3A USB C
1 × $ 65.00 -
×
 LumikNob Potenciómetro con iluminación circular - UNIT DevLab
1 × $ 79.00
LumikNob Potenciómetro con iluminación circular - UNIT DevLab
1 × $ 79.00 -
×
 UNIT DualMCU ONE ESP32 + RP2040
1 × $ 269.00
UNIT DualMCU ONE ESP32 + RP2040
1 × $ 269.00 -
×
 Congelante Detector de Falla para Circuitos Electrónicos 170 ml SILIJET E-3
1 × $ 109.00
Congelante Detector de Falla para Circuitos Electrónicos 170 ml SILIJET E-3
1 × $ 109.00 -
×
 S-160 Tapete Magnético Antiestática 45x30cm
1 × $ 181.00
S-160 Tapete Magnético Antiestática 45x30cm
1 × $ 181.00 -
×
 Set de Pinzas con Punta de Cerámica
1 × $ 113.00
Set de Pinzas con Punta de Cerámica
1 × $ 113.00 -
×
 CAU-115A Cautin Tipo Lapiz de 35W 127V con Accesorios
2 × $ 159.00
CAU-115A Cautin Tipo Lapiz de 35W 127V con Accesorios
2 × $ 159.00 -
×
 LM386 Modulo Amplificador de Audio 200x 5V-12V
1 × $ 23.00
LM386 Modulo Amplificador de Audio 200x 5V-12V
1 × $ 23.00 -
×
 Eliminador 9V 1A con Plug
1 × $ 55.00
Eliminador 9V 1A con Plug
1 × $ 55.00 -
×
 2SA1492 Transistor PNP -180V -15A TO-3PN
1 × $ 16.00
2SA1492 Transistor PNP -180V -15A TO-3PN
1 × $ 16.00 -
×
 UShieldX Shield de Expansión para Arduino UNO
1 × $ 456.00
UShieldX Shield de Expansión para Arduino UNO
1 × $ 456.00 -
×
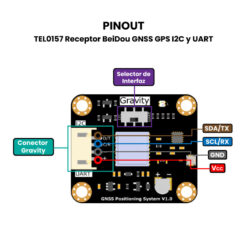
 TEL0157 Receptor BeiDou GNSS GPS I2C y UART
1 × $ 410.00
TEL0157 Receptor BeiDou GNSS GPS I2C y UART
1 × $ 410.00 -
×
 46122 Clavijas Planas de Hule Volteck
1 × $ 18.00
46122 Clavijas Planas de Hule Volteck
1 × $ 18.00 -
×
 UNIT Kit Mega 2560 con 31 Practicas
1 × $ 849.00
UNIT Kit Mega 2560 con 31 Practicas
1 × $ 849.00 -
×
 UNIT Kit ESP32 Básico con 10 practicas
1 × $ 269.00
UNIT Kit ESP32 Básico con 10 practicas
1 × $ 269.00 -
×
 Cable USB 5V con pinzas caimán
1 × $ 27.00
Cable USB 5V con pinzas caimán
1 × $ 27.00 -
×
 RC522 Módulo RFID Lectura y Escritura
1 × $ 29.00
RC522 Módulo RFID Lectura y Escritura
1 × $ 29.00
Puede que estés interesado en…
-
Add
 TDA7294 Amplificador de Audio Mono 100W
$ 138.00
TDA7294 Amplificador de Audio Mono 100W
$ 138.00 -
Add
 TDA7297 Amplificador Audio de Doble Canal 12V DC 15W
$ 91.00
TDA7297 Amplificador Audio de Doble Canal 12V DC 15W
$ 91.00 -
Add
 1002 HiFi Amplificador Bluetooth Estereo 100W
$ 593.00
1002 HiFi Amplificador Bluetooth Estereo 100W
$ 593.00 -
Add
 502L Amplificador Bluetooth Estereo 50W
$ 150.00
502L Amplificador Bluetooth Estereo 50W
$ 150.00 -
Add
 PCM1808 Decodificador de Audio Estereo ADC 99dB SNR 24 Bits
$ 71.00
PCM1808 Decodificador de Audio Estereo ADC 99dB SNR 24 Bits
$ 71.00


























Valoraciones
No hay valoraciones aún.