






NEO6MV2 GPS con Control de Vuelo
$ 126.00
Sin existencias
| CANTIDAD | PRECIO |
|---|---|
| 10 piezas | $ 112.71 |
| 25 piezas | $ 102.28 |
| 35 piezas | $ 93.62 |
INFORMACIÓN
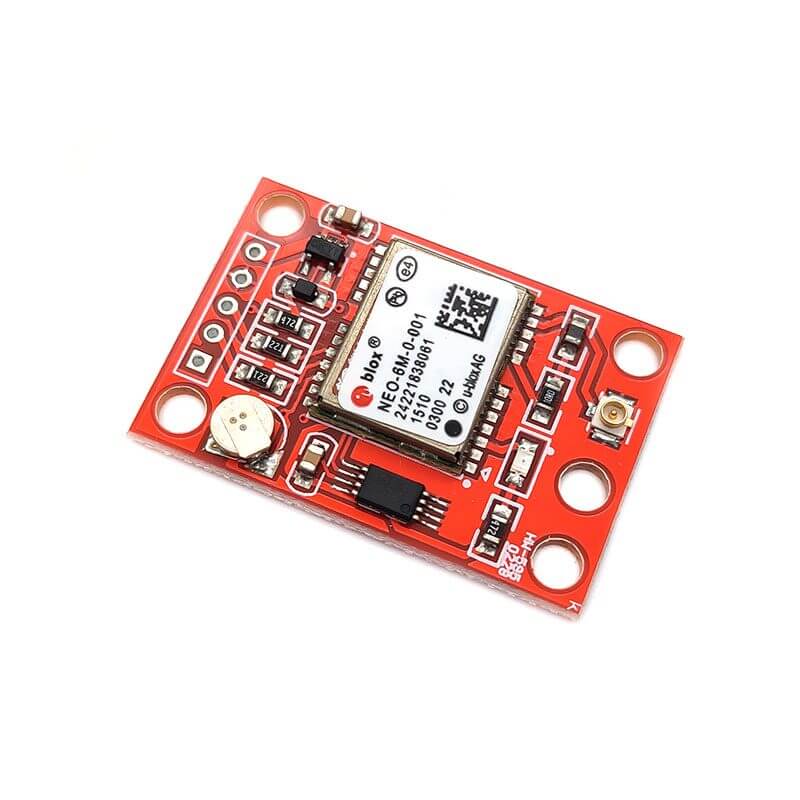
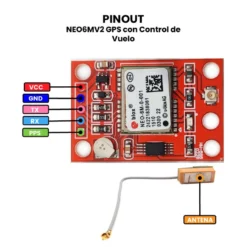
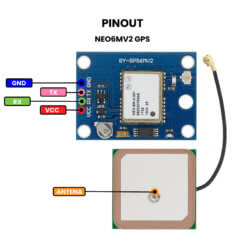
El NEO-6M V2 GPS con control de vuelo es un módulo de posicionamiento global basado en el chip u-blox NEO-6M, diseñado para recibir señales de satélites GPS y calcular con alta precisión la ubicación, velocidad y tiempo en tiempo real. Funciona mediante la recepción simultánea de datos de múltiples satélites, que son procesados internamente para determinar coordenadas geográficas y otros parámetros de navegación. Este módulo integra una antena cerámica para una mejor captación de señal, memoria EEPROM para guardar configuraciones y una interfaz serial UART que permite la comunicación directa con tarjetas de desarrollo o controladoras de vuelo.
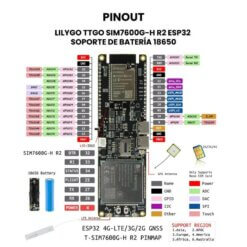
El NEO-6M V2 GPS con control de vuelo es un módulo de posicionamiento satelital diseñado para obtener coordenadas geográficas precisas, velocidad y hora, muy utilizado en proyectos de navegación autónoma, drones y vehículos no tripulados. Entre sus aplicaciones destacan el control y estabilización de vuelo en sistemas FPV, la creación de rutas preprogramadas para aeronaves o robots móviles, el registro de datos geoespaciales para mapeo y monitoreo, y la localización de dispositivos en tiempo real. Es compatible con diversas tarjetas de desarrollo y controladoras como Arduino (UNO, Mega, Nano), ESP32, Raspberry Pi, STM32, así como controladores de vuelo populares como APM y Pixhawk, permitiendo su integración en plataformas de aeromodelismo, navegación terrestre o marítima y proyectos de geolocalización con alta precisión.
ESPECIFICACIONES Y CARACTERÍSTICAS
- Chip GPS: u-blox NEO-6M.
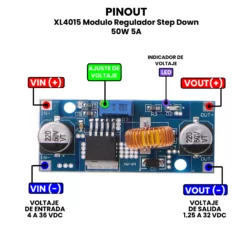
- Voltaje de operación: 3.3 V a 5 V (entrada).
- Frecuencia de operación: L1 (1575.42 MHz).
- Sensibilidad:
- Seguimiento: –161 dBm.
- Adquisición: –160 dBm.
- Tasa de actualización: 1 Hz (configurable hasta 5 Hz).
- Precisión de posicionamiento: < 2.5 m (CEP).
- Tiempo de arranque:
- Cold Start: < 27 s.
- Warm Start: < 25 s.
- Hot Start: < 1 s.
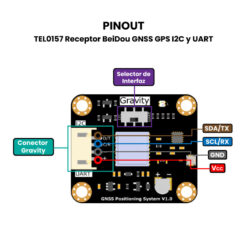
- Interfaz de comunicación: UART (TTL) y, en algunos modelos, I²C.
- Baud rate predeterminado: 9600 bps (configurable).
- Consumo de corriente: ~67 mA en seguimiento.
- Memoria: EEPROM para guardar configuraciones.
- Antena: Cerámica integrada + conector para antena externa (en modelos con soporte).
- Compatibilidad: Compatible con protocolos NMEA y u-blox UBX.
- Dimensiones:
- Antena: 25 mm x 25 mm.
- Módulo: 35 mm x 25 mm x 5 mm.
- Peso: 7 g.
Nota: Este módulo no funciona en espacios cerrados.
DOCUMENTACIÓN Y RECURSOS
INFORMACIÓN ADICIONAL
¿Cómo probar el NEO6MV2 GPS con Control de Vuelo?
Materiales Necesarios:
- Módulo NEO-6M V2 GPS (con antena cerámica integrada o antena externa activa).
- Tarjeta de desarrollo: Arduino UNO, Mega, Nano o ESP32 (para prueba directa)
ó controlador de vuelo APM/Pixhawk (para prueba en dron). - Cables jumper macho-hembra.
- Computadora con Arduino IDE o software de control de vuelo (Mission Planner, QGroundControl).
- Fuente de energía estable (la tarjeta o el controlador de vuelo suelen proveerla).
Conexión del Módulo GPS con Arduino.
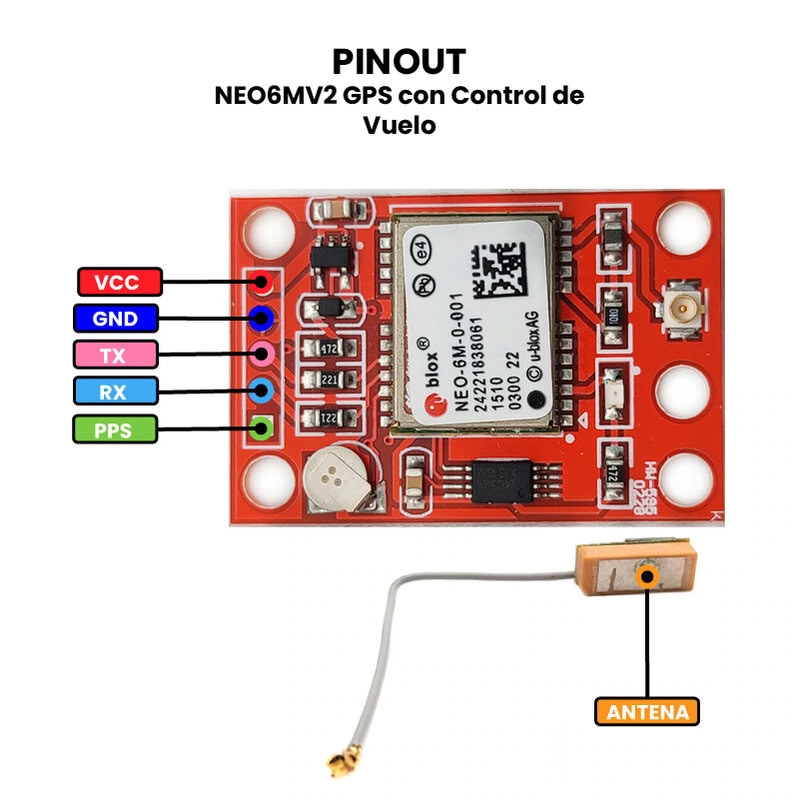
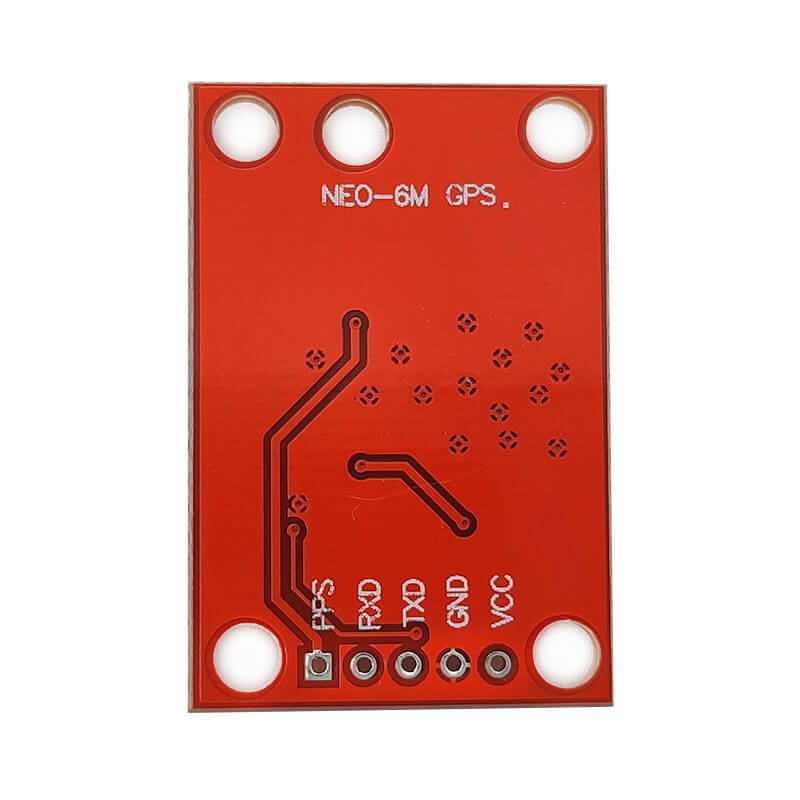
El NEO-6M se comunica por UART (Serial), por lo que las conexiones típicas son:
| NEO-6M V2 | Arduino UNO | Arduino Mega | ESP32 |
|---|---|---|---|
| VCC | 5V* o 3.3V | 5V* o 3.3V | 3.3V o 5V |
| GND | GND | GND | GND |
| TX | Pin 4 (ej. SoftwareSerial RX) | Pin 18 (RX1) | GPIO16 o similar |
| RX | Pin 3 (ej. SoftwareSerial TX) | Pin 19 (TX1) | GPIO17 o similar |
*El módulo soporta 3.3V y 5V en alimentación gracias a su regulador interno, pero la lógica UART es 3.3V (aunque tolera 5V en la mayoría de módulos).
Código de Prueba.
- Instala Arduino IDE.
- Instala la librería TinyGPS++ y SoftwareSerial (si usas UNO/Nano) desde el gestor de librerías.
- Carga un código de prueba como este:
#include <TinyGPS++.h>
#include <SoftwareSerial.h>
SoftwareSerial gpsSerial(4, 3); // RX, TX
TinyGPSPlus gps;
void setup() {
Serial.begin(9600); // Monitor Serial
gpsSerial.begin(9600); // GPS baud rate por defecto
Serial.println("Iniciando GPS NEO-6M...");
}
void loop() {
while (gpsSerial.available() > 0) {
gps.encode(gpsSerial.read());
if (gps.location.isUpdated()) {
Serial.print("Latitud: "); Serial.println(gps.location.lat(), 6);
Serial.print("Longitud: "); Serial.println(gps.location.lng(), 6);
Serial.print("Altitud (m): "); Serial.println(gps.altitude.meters());
Serial.print("Satélites: "); Serial.println(gps.satellites.value());
Serial.print("Velocidad (km/h): "); Serial.println(gps.speed.kmph());
Serial.println("--------------------------");
}
}
}
Prueba y Lectura de Datos.
- Abre el Monitor Serial en Arduino IDE a 9600 baudios.
- Coloca el módulo GPS en un lugar con buena vista al cielo (mínimo 3 satélites para un fix básico).
- La primera vez, el “cold start” puede tardar 30 segundos a 1 minuto en adquirir señal.
- Una vez con “fix”, deberías ver latitud, longitud, altitud, velocidad y número de satélites.
Integración con Controlador de Vuelo (APM/Pixhawk).
- Conecta el módulo NEO-6M al puerto GPS del controlador de vuelo:
- VCC → 5V.
- GND → GND.
- TX → RX GPS del controlador.
- RX → TX GPS del controlador.
- Enciende el controlador y conéctalo a Mission Planner (APM) o QGroundControl (Pixhawk).
- Configura el protocolo GPS a Auto / NMEA y la velocidad de puerto a 9600 bps.
- Coloca el dron en exterior y espera el fix GPS (en Mission Planner verás el icono de GPS en verde y la cantidad de satélites).
- Realiza pruebas de funciones como Retorno a Casa (RTH) o Waypoint Navigation si tu dron lo soporta.
ENLACES EXTERNOS
| Peso | 0.007 kg |
|---|---|
| Dimensiones | 0.01 × 0.01 × 0.01 cm |
Solo los usuarios registrados que hayan comprado este producto pueden hacer una valoración.
También te recomendamos…










Productos relacionados



GENERAL






Valoraciones
No hay valoraciones aún.