-
×
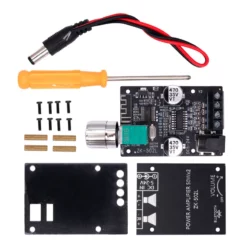 502L Amplificador Bluetooth Estereo 50W
1 × $ 150.00
502L Amplificador Bluetooth Estereo 50W
1 × $ 150.00 -
×
 NanoKVM Full IP-KVM RISC-V
1 × $ 2,379.00
NanoKVM Full IP-KVM RISC-V
1 × $ 2,379.00
Puede que estés interesado en…
-
Add
 NanoKVM Lite IP-KVM RISC-V
$ 1,299.00
NanoKVM Lite IP-KVM RISC-V
$ 1,299.00 -
Add
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto
 Cable Auxiliar 3.5mm Estéreo 3M
(1) Rango de precios: desde $ 48.00 hasta $ 54.00
Cable Auxiliar 3.5mm Estéreo 3M
(1) Rango de precios: desde $ 48.00 hasta $ 54.00 -
Add
 Cable HDMI Alta Definición 4K 1.5m o 3m
El precio original era: $ 68.00.$ 54.00El precio actual es: $ 54.00.
Cable HDMI Alta Definición 4K 1.5m o 3m
El precio original era: $ 68.00.$ 54.00El precio actual es: $ 54.00. -
Add
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto
 Cable Ethernet CAT6 RJ45 Plano 1 / 2 / 5 / 10 m
Rango de precios: desde $ 57.00 hasta $ 81.00
Cable Ethernet CAT6 RJ45 Plano 1 / 2 / 5 / 10 m
Rango de precios: desde $ 57.00 hasta $ 81.00 -
Add
 Conector Estéreo de 3.5mm 90 grados Niquelado Negro
$ 16.00
Conector Estéreo de 3.5mm 90 grados Niquelado Negro
$ 16.00


















Valoraciones
No hay valoraciones aún.