-
×
 Limpiador Dieléctrico para Circuitos y Tarjetas Electrónicas 454 ml COMPUKLIN
1 × $ 189.00
Limpiador Dieléctrico para Circuitos y Tarjetas Electrónicas 454 ml COMPUKLIN
1 × $ 189.00 -
×
 TE-808 Lupa de Soldadura con Abrazadera Universal
1 × $ 635.00
TE-808 Lupa de Soldadura con Abrazadera Universal
1 × $ 635.00 -
×
 Arduino Uno Rev3
1 × $ 479.00
Arduino Uno Rev3
1 × $ 479.00 -
×
 Cepillo de Alambre de Latón y Acero Inoxidable para Limpieza de Boquillas
1 × $ 39.00
Cepillo de Alambre de Latón y Acero Inoxidable para Limpieza de Boquillas
1 × $ 39.00 -
×
 DS1302 Módulo de Tiempo Real
1 × $ 18.00
DS1302 Módulo de Tiempo Real
1 × $ 18.00 -
×
 Controlador de Velocidad 6-60V 30A Motor DC PWM
1 × $ 163.00
Controlador de Velocidad 6-60V 30A Motor DC PWM
1 × $ 163.00 -
×
 Estación de Soldadura con Brazos Flexibles
1 × $ 728.00
Estación de Soldadura con Brazos Flexibles
1 × $ 728.00 -
×
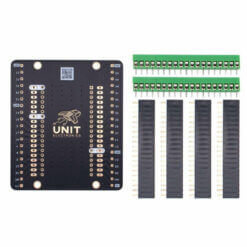 UNIT Placa de Expansión para ESP32 38 Pines
1 × $ 79.00
UNIT Placa de Expansión para ESP32 38 Pines
1 × $ 79.00 -
×
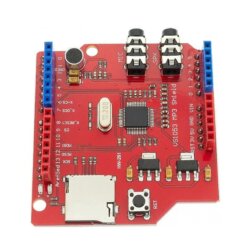 VS1053B Reproductor MP3 TF Shield Arduino
1 × $ 178.00
VS1053B Reproductor MP3 TF Shield Arduino
1 × $ 178.00
Puede que estés interesado en…
-
Add
 Toallitas Húmedas para Limpieza de Equipos Electrónicos 30pcs COMPUTOALLAS
$ 59.00
Toallitas Húmedas para Limpieza de Equipos Electrónicos 30pcs COMPUTOALLAS
$ 59.00 -
Add
 Limpiador Electrónico en Aerosol 454 ml SILIJET E-7 Plus
$ 169.00
Limpiador Electrónico en Aerosol 454 ml SILIJET E-7 Plus
$ 169.00 -
Add
 Espuma Limpiadora para Equipos Electrónicos 454 ml SILIMPO
$ 99.00
Espuma Limpiadora para Equipos Electrónicos 454 ml SILIMPO
$ 99.00 -
Add
 Congelante Detector de Falla para Circuitos Electrónicos 170 ml SILIJET E-3
$ 109.00
Congelante Detector de Falla para Circuitos Electrónicos 170 ml SILIJET E-3
$ 109.00 -
Add
 Limpiador y Lubricante para Equipos Electrónicos en Aerosol 170 ml SILIJET E-PLUS
$ 89.00
Limpiador y Lubricante para Equipos Electrónicos en Aerosol 170 ml SILIJET E-PLUS
$ 89.00


















Valoraciones
No hay valoraciones aún.