-
×
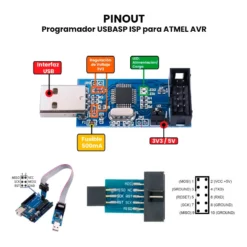
 Programador USBASP ISP para ATMEL AVR
1 × $ 77.00
Programador USBASP ISP para ATMEL AVR
1 × $ 77.00
Puede que estés interesado en…
-
Add
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto
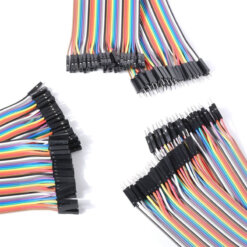
 Cable Dupont 20cm H-H o M-M 1pz
$ 3.00
Cable Dupont 20cm H-H o M-M 1pz
$ 3.00 -
Add
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto
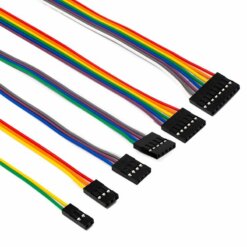
 Cables Dupont Extra Largos 30cm HH MH MM
Rango de precios: desde $ 20.00 hasta $ 24.00
Cables Dupont Extra Largos 30cm HH MH MM
Rango de precios: desde $ 20.00 hasta $ 24.00 -
Add
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto
 Cable de Alambre Estañado 24AWG 20cm 100 Piezas
Rango de precios: desde $ 39.00 hasta $ 45.00
Cable de Alambre Estañado 24AWG 20cm 100 Piezas
Rango de precios: desde $ 39.00 hasta $ 45.00 -
Add
 ATMEGA8-16PU Microcontrolador DIP-28
El precio original era: $ 97.00.$ 87.00El precio actual es: $ 87.00.
ATMEGA8-16PU Microcontrolador DIP-28
El precio original era: $ 97.00.$ 87.00El precio actual es: $ 87.00. -
Add
 Tira Header Macho Doble 2.54mm
El precio original era: $ 3.00.$ 2.00El precio actual es: $ 2.00.
Tira Header Macho Doble 2.54mm
El precio original era: $ 3.00.$ 2.00El precio actual es: $ 2.00.




















Valoraciones
No hay valoraciones aún.