-
×
 Pasta Limpiadora para Puntas de Cautín 6g
2 × $ 34.00
Pasta Limpiadora para Puntas de Cautín 6g
2 × $ 34.00 -
×
 Flux Limpiador para Soldar 250 ML
1 × $ 117.00
Flux Limpiador para Soldar 250 ML
1 × $ 117.00 -
×
 Cable UTP Categoría 5e Calibre 24AWG 1 Metro Color Gris
1 × $ 11.00
Cable UTP Categoría 5e Calibre 24AWG 1 Metro Color Gris
1 × $ 11.00 -
×
 5 Rollos de Alambre de Cobre de un Solo Núcleo 30 AWG
1 × $ 197.00
5 Rollos de Alambre de Cobre de un Solo Núcleo 30 AWG
1 × $ 197.00 -
×
 TLE5012BE1000XUMA1 IC SMD Sensor
1 × $ 79.22
TLE5012BE1000XUMA1 IC SMD Sensor
1 × $ 79.22 -
×
 Congelante Detector de Falla para Circuitos Electrónicos 170 ml SILIJET E-3
1 × $ 109.00
Congelante Detector de Falla para Circuitos Electrónicos 170 ml SILIJET E-3
1 × $ 109.00 -
×
 Bateria LiPo 3.7V 250mAh 502030
1 × $ 59.00
Bateria LiPo 3.7V 250mAh 502030
1 × $ 59.00 -
×
 Espuma Limpiadora para Equipos Electrónicos 454 ml SILIMPO
1 × $ 99.00
Espuma Limpiadora para Equipos Electrónicos 454 ml SILIMPO
1 × $ 99.00 -
×
 Motor R150 DC 1V - 3V con eje de 4.5mm
1 × $ 25.00
Motor R150 DC 1V - 3V con eje de 4.5mm
1 × $ 25.00 -
×
 AFC07-S24ECC-00 Conector Cable Plano Flex 24 Pines Top Contact
1 × $ 13.00
AFC07-S24ECC-00 Conector Cable Plano Flex 24 Pines Top Contact
1 × $ 13.00 -
×
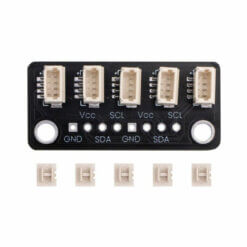 UNIT Módulo Hub I2C QW/ST 5 Puertos
1 × $ 26.00
UNIT Módulo Hub I2C QW/ST 5 Puertos
1 × $ 26.00 -
×
 Sensor Ultrasónico Contra El Agua JSN-SR04T
1 × $ 94.00
Sensor Ultrasónico Contra El Agua JSN-SR04T
1 × $ 94.00
Puede que estés interesado en…
-
Add
 Toallitas Húmedas para Limpieza de Equipos Electrónicos 30pcs COMPUTOALLAS
$ 59.00
Toallitas Húmedas para Limpieza de Equipos Electrónicos 30pcs COMPUTOALLAS
$ 59.00 -
Add
 Limpiador Dieléctrico para Circuitos y Tarjetas Electrónicas 454 ml COMPUKLIN
$ 189.00
Limpiador Dieléctrico para Circuitos y Tarjetas Electrónicas 454 ml COMPUKLIN
$ 189.00 -
Add
 Limpiador Electrónico en Aerosol 454 ml SILIJET E-7 Plus
$ 169.00
Limpiador Electrónico en Aerosol 454 ml SILIJET E-7 Plus
$ 169.00 -
Add
 Limpiador y Lubricante para Equipos Electrónicos en Aerosol 170 ml SILIJET E-PLUS
$ 89.00
Limpiador y Lubricante para Equipos Electrónicos en Aerosol 170 ml SILIJET E-PLUS
$ 89.00 -
Add
 Limpiador de Pantallas 170 ml COMPUSTAT
$ 79.00
Limpiador de Pantallas 170 ml COMPUSTAT
$ 79.00







































Valoraciones
No hay valoraciones aún.