-
×
 Kit Motor Brushless 1000kv A2212 Drone Driver ESC 30A
1 × $ 278.00
Kit Motor Brushless 1000kv A2212 Drone Driver ESC 30A
1 × $ 278.00 -
×
 Sensor de Luz UV 290-390nm (UVA, UVB) RS485 SEN0642
1 × $ 1,376.00
Sensor de Luz UV 290-390nm (UVA, UVB) RS485 SEN0642
1 × $ 1,376.00 -
×
 Kit de Separadores de Latón M3 120 Piezas
1 × $ 98.00
Kit de Separadores de Latón M3 120 Piezas
1 × $ 98.00 -
×
 Adaptador ATX Fuente de Poder XH-M229 24 Pin
1 × $ 66.00
Adaptador ATX Fuente de Poder XH-M229 24 Pin
1 × $ 66.00 -
×
 Soldador de Gas Tipo Bolígrafo con Accesorios
1 × $ 290.00
Soldador de Gas Tipo Bolígrafo con Accesorios
1 × $ 290.00 -
×
 Due Core ATmel Arm compatible con Arduino
1 × $ 457.00
Due Core ATmel Arm compatible con Arduino
1 × $ 457.00 -
×
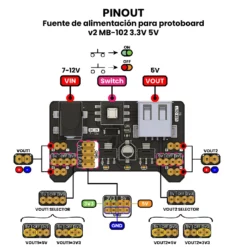
 Fuente de alimentación para protoboard v2 MB-102 3.3V 5V
1 × $ 27.00
Fuente de alimentación para protoboard v2 MB-102 3.3V 5V
1 × $ 27.00
Puede que estés interesado en…
-
Add
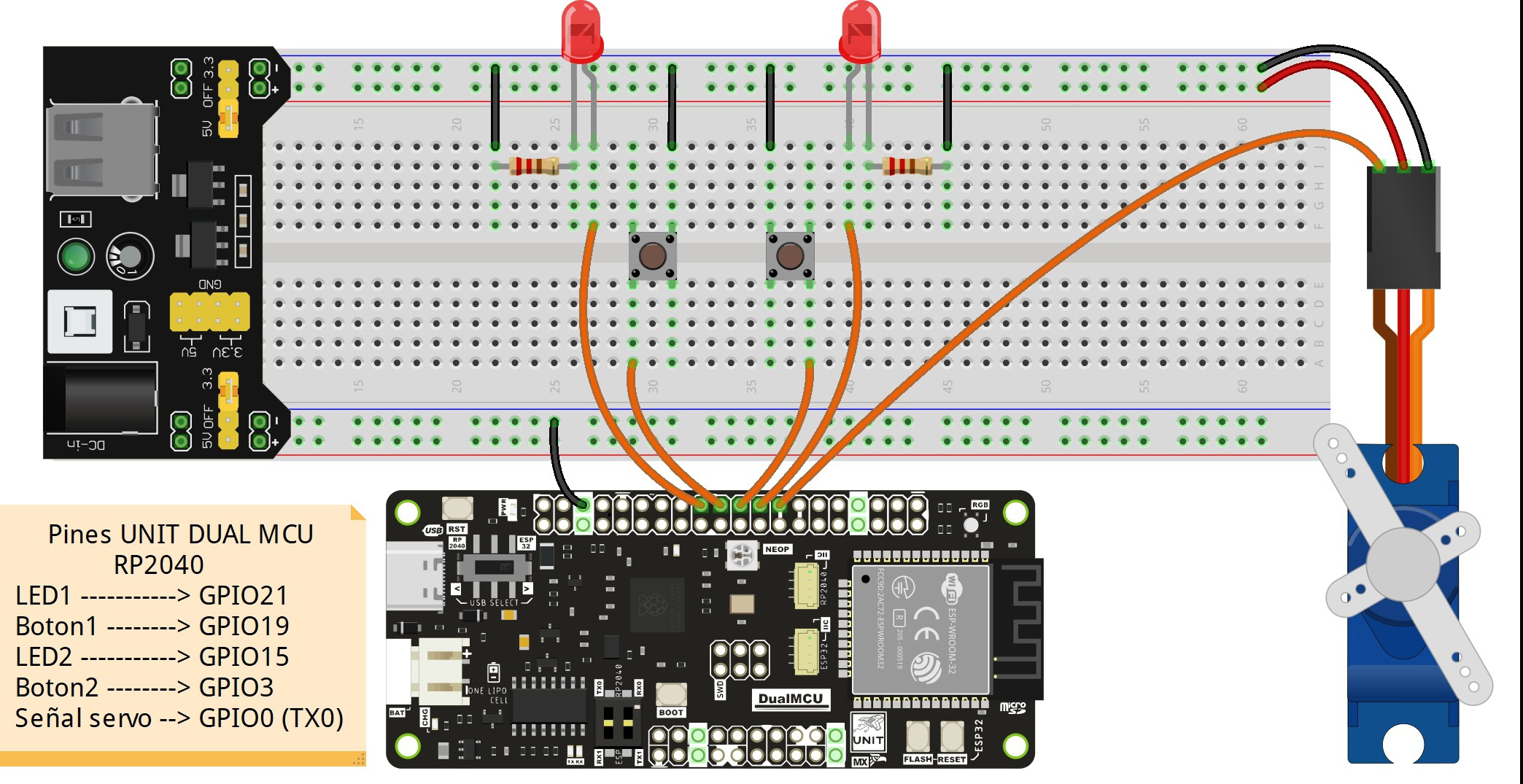
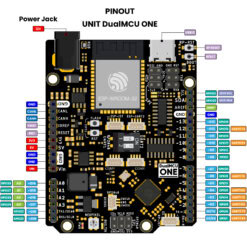
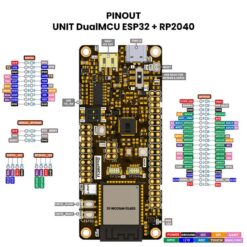
 UNIT DualMCU ONE ESP32 + RP2040
$ 269.00
UNIT DualMCU ONE ESP32 + RP2040
$ 269.00 -
Add
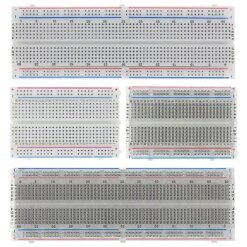
 Protoboard de 400pts y 830pts Blanco o Transparente
$ 27.00
Protoboard de 400pts y 830pts Blanco o Transparente
$ 27.00 -
Add
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto
 Cables Dupont Extra Largos 30cm HH MH MM
Rango de precios: desde $ 20.00 hasta $ 24.00
Cables Dupont Extra Largos 30cm HH MH MM
Rango de precios: desde $ 20.00 hasta $ 24.00 -
Add
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto
 Adaptadores BNC a Conector a Banana Doble
$ 58.00
Adaptadores BNC a Conector a Banana Doble
$ 58.00 -
Add
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto
 Cable Banana Banana de 4mm Negro/Rojo
Rango de precios: desde $ 60.00 hasta $ 65.00
Cable Banana Banana de 4mm Negro/Rojo
Rango de precios: desde $ 60.00 hasta $ 65.00








































Valoraciones
No hay valoraciones aún.