-
×
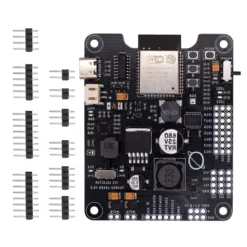
 NanoKVM Lite IP-KVM RISC-V
1 × $ 1,299.00
NanoKVM Lite IP-KVM RISC-V
1 × $ 1,299.00 -
×
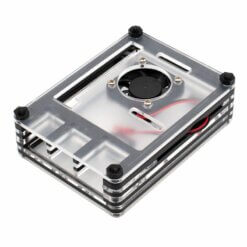 Carcasa Raspberry Pi 4B Acrílico
1 × $ 118.00
Carcasa Raspberry Pi 4B Acrílico
1 × $ 118.00 -
×
 Shield Display TFT 2.4" Touch para Arduino Uno Mega
1 × $ 182.00
Shield Display TFT 2.4" Touch para Arduino Uno Mega
1 × $ 182.00 -
×
 Tuxedo 18650 Rocket Launcher
1 × $ 589.00
Tuxedo 18650 Rocket Launcher
1 × $ 589.00 -
×
 Regulador Step Down Buck 240W 10A LB07
1 × $ 130.00
Regulador Step Down Buck 240W 10A LB07
1 × $ 130.00 -
×
 Controlador de Velocidad 6-60V 30A Motor DC PWM
1 × $ 163.00
Controlador de Velocidad 6-60V 30A Motor DC PWM
1 × $ 163.00 -
×
 Thermofit 8 Diferentes Tamaños 328 Piezas
1 × $ 41.00
Thermofit 8 Diferentes Tamaños 328 Piezas
1 × $ 41.00 -
×
 Conector USB Tipo Micro B Hembra U254-051N-4BH806
1 × $ 6.00
Conector USB Tipo Micro B Hembra U254-051N-4BH806
1 × $ 6.00 -
×
 Cepillo de Alambre de Latón y Acero Inoxidable para Limpieza de Boquillas
1 × $ 39.00
Cepillo de Alambre de Latón y Acero Inoxidable para Limpieza de Boquillas
1 × $ 39.00 -
×
 Pelador de Cables Coaxiales Giratorio
1 × $ 35.00
Pelador de Cables Coaxiales Giratorio
1 × $ 35.00
Puede que estés interesado en…
-
Add
 Kit Agujas de 0.15-0.35mm para Limpieza de Boquillas
$ 72.00
Kit Agujas de 0.15-0.35mm para Limpieza de Boquillas
$ 72.00 -
Add
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto
 Conector Neumático Rápido
Rango de precios: desde $ 14.00 hasta $ 15.00
Conector Neumático Rápido
Rango de precios: desde $ 14.00 hasta $ 15.00 -
Add
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto
 Boquilla de 0.4mm MK8 de Latón o Acero Endurecido
Rango de precios: desde $ 12.00 hasta $ 33.00
Boquilla de 0.4mm MK8 de Latón o Acero Endurecido
Rango de precios: desde $ 12.00 hasta $ 33.00 -
Add
 RG6-305 Cable Coaxial 1m 75 Ohms C/50% Malla
$ 6.00
RG6-305 Cable Coaxial 1m 75 Ohms C/50% Malla
$ 6.00 -
Add
 Gravity Kit de 37 Sensores Compatibles con Arduino KIT0150
$ 3,082.00
Gravity Kit de 37 Sensores Compatibles con Arduino KIT0150
$ 3,082.00




















Valoraciones
No hay valoraciones aún.