-
×
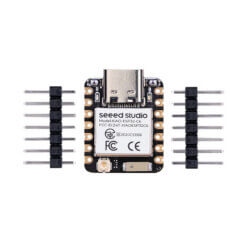 XIAO ESP32-C6 Wi-Fi y BLE
1 × $ 125.00
XIAO ESP32-C6 Wi-Fi y BLE
1 × $ 125.00 -
×
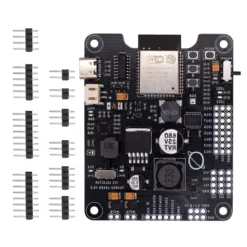 Tuxedo 18650 Rocket Launcher
1 × $ 589.00
Tuxedo 18650 Rocket Launcher
1 × $ 589.00 -
×
 Kit Terminales Termorretráctiles 250pcs SV, MDD, RV, BHT y FDFD
1 × $ 328.00
Kit Terminales Termorretráctiles 250pcs SV, MDD, RV, BHT y FDFD
1 × $ 328.00 -
×
 PJ-301M Jack 3.5mm N.C Conector de Audio
1 × $ 6.00
PJ-301M Jack 3.5mm N.C Conector de Audio
1 × $ 6.00 -
×
 Matriz LED 8x8 3mm 1088AS
1 × $ 15.00
Matriz LED 8x8 3mm 1088AS
1 × $ 15.00 -
×
 Espejo Reflectante 20x3mm para Máquina Láser CO2
2 × $ 183.00
Espejo Reflectante 20x3mm para Máquina Láser CO2
2 × $ 183.00 -
×
 Kit de Luz Led Giratoria CD4017 DIY con Control de Sonido
1 × $ 32.00
Kit de Luz Led Giratoria CD4017 DIY con Control de Sonido
1 × $ 32.00 -
×
 TE-808 Lupa de Soldadura con Abrazadera Universal
1 × $ 635.00
TE-808 Lupa de Soldadura con Abrazadera Universal
1 × $ 635.00 -
×
 Microscopio Digital DM4 1000x Óptico con Base
1 × $ 899.00
Microscopio Digital DM4 1000x Óptico con Base
1 × $ 899.00 -
×
 Control de Temperatura W2809 DC 12V + Sensor NTC
1 × $ 117.00
Control de Temperatura W2809 DC 12V + Sensor NTC
1 × $ 117.00 -
×
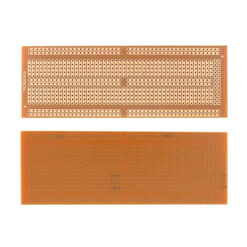 Placa Perforada Tipo Protoboard 48 x 133 mm
1 × $ 15.00
Placa Perforada Tipo Protoboard 48 x 133 mm
1 × $ 15.00 -
×
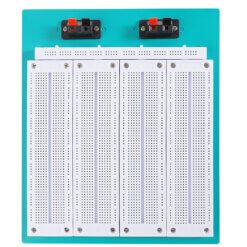 SYB-500 Protoboard 2700 Puntos
1 × $ 149.00
SYB-500 Protoboard 2700 Puntos
1 × $ 149.00 -
×
 LRS-200-12 Fuente Conmutada 12V 17A MEAN WELL
1 × $ 589.00
LRS-200-12 Fuente Conmutada 12V 17A MEAN WELL
1 × $ 589.00 -
×
 Tira Led Neopixel 5m WS2812B
1 × $ 349.00
Tira Led Neopixel 5m WS2812B
1 × $ 349.00
Puede que estés interesado en…
-
Add
 Kit Conectores LT41 de Empalme Rápido 75pcs
$ 208.00
Kit Conectores LT41 de Empalme Rápido 75pcs
$ 208.00 -
Add
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto
 Tira Header Hembra 2.54mm Diferentes Pines
Rango de precios: desde $ 2.00 hasta $ 5.00
Tira Header Hembra 2.54mm Diferentes Pines
Rango de precios: desde $ 2.00 hasta $ 5.00 -
Add
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto
 GA12-N20 Motorreductor DC 3V / 6V / 12V
Rango de precios: desde $ 80.00 hasta $ 97.00
GA12-N20 Motorreductor DC 3V / 6V / 12V
Rango de precios: desde $ 80.00 hasta $ 97.00 -
Add
 46122 Clavijas Planas de Hule Volteck
El precio original era: $ 20.00.$ 18.00El precio actual es: $ 18.00.
46122 Clavijas Planas de Hule Volteck
El precio original era: $ 20.00.$ 18.00El precio actual es: $ 18.00. -
Add
 46205 Clavija Industrial Plástica Aterrizada Volteck
$ 20.00
46205 Clavija Industrial Plástica Aterrizada Volteck
$ 20.00





















Valoraciones
No hay valoraciones aún.