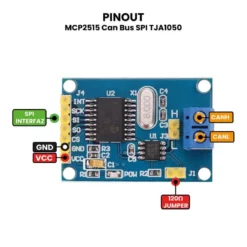

MCP2515 Can Bus SPI TJA1050
$ 39.00
24 disponibles
| CANTIDAD | PRECIO |
|---|---|
| 10 piezas | $ 33.37 |
| 25 piezas | $ 29.53 |
| 35 piezas | $ 26.49 |
INFORMACIÓN
El MCP2515 CAN Bus SPI con transceptor TJA1050 es un módulo de comunicación que permite a microcontroladores y tarjetas de desarrollo interactuar con redes CAN Bus (Controller Area Network), muy utilizadas en la industria automotriz e industrial. Su funcionamiento se basa en el chip MCP2515, que actúa como controlador CAN y se comunica con el microcontrolador mediante el protocolo SPI, mientras que el TJA1050 funciona como transceptor físico, adaptando las señales lógicas del MCP2515 a los niveles diferenciales del bus CAN. De esta manera, el módulo convierte y transmite datos entre el microcontrolador y la red CAN, permitiendo enviar y recibir mensajes de forma robusta y confiable, incluso en entornos con ruido eléctrico.
El MCP2515 CAN Bus SPI con TJA1050 se utiliza en proyectos donde se requiere interconectar dispositivos mediante el protocolo CAN, siendo muy común en automóviles, robots móviles, maquinaria industrial, sistemas de monitoreo, impresoras 3D y proyectos IoT que necesitan comunicación robusta y tolerante al ruido. Sus aplicaciones incluyen la lectura de datos de la ECU en vehículos, la comunicación entre múltiples microcontroladores, la integración de sensores distribuidos y el desarrollo de sistemas de control descentralizados. Gracias a su interfaz SPI, este módulo es compatible con tarjetas de desarrollo como Arduino, ESP32, ESP8266, Raspberry Pi, STM32 y PIC, lo que lo hace versátil y fácil de integrar en proyectos de electrónica y automatización.
ESPECIFICACIONES Y CARACTERÍSTICAS
- Controlador CAN: MCP2515.
- Transceptor: TJA1050.
- Interfaz de comunicación: SPI.
- Protocolo: CAN 2.0 B.
- Velocidad de Comunicación: 1 Mb/s.
- Tipo de Comunicación: Half-Duplex.
- Longitud máxima de alcance de 1200 metros (a 100 kbit/s).
- Buffers:
- TX: 3.
- RX: 2.
- Capacidad: Hasta 112 nodos.
- Oscilador de cristal: 8 MHz.
- Detección de corto de Tierra en la entrada TXD.
- Protección anti cortocircuito.
- Voltaje de operación: 5 VDC.
- Consumo Corriente:
- Activo: 500 uA (máx.).
- Reposo: 1 uA.
- Temperatura de funcionamiento: – 40 °C a 85 °C.
- Dimensiones: 40 mm x 28 mm x 11 mm.
- Peso: 7 g.
DOCUMENTACIÓN Y RECURSOS
- Librerías
INFORMACIÓN ADICIONAL
¿Qué es Half Duplex?
Half Duplex (semidúplex) es un tipo de comunicación en telecomunicaciones donde los datos pueden ser transmitidos en ambas direcciones, pero no simultáneamente. Esto significa que un dispositivo puede enviar o recibir datos, pero no ambos al mismo tiempo. Es común en dispositivos como walkie-talkies y radios de dos vías, donde una persona habla y la otra espera para responder. También se encuentra en redes locales antiguas y sistemas de comunicación militar, siendo más simple y menos costoso de implementar que un sistema full duplex, que permite la comunicación simultánea en ambas direcciones.
¿Cómo probar el MCP2515 Can Bus SPI TJA1050?
Sirve para verificar que el módulo y la conexión SPI funcionan, sin otro nodo CAN.
Material Necesario:
- MCP2515 Can Bus SPI TJA1050.
- Arduino UNO.
- Jumpers.
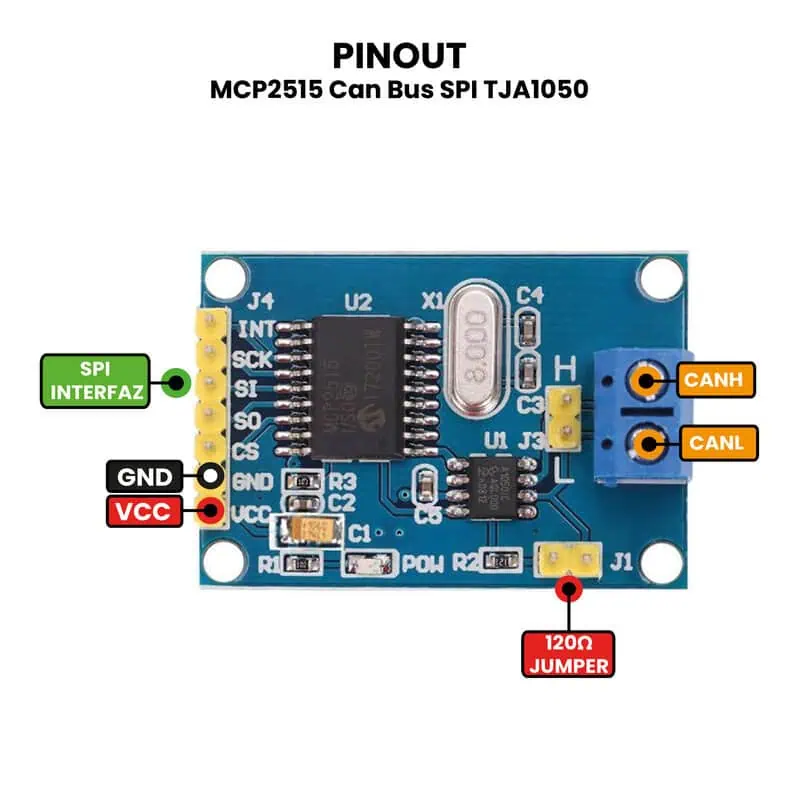
Conexiones.
- VCC → 5V.
- GND → GND.
- CS (NSS) → D10.
- SCK → D13.
- SI/MOSI → D11.
- SO/MISO → D12.
- INT → D2 (opcional en este ejemplo).
Funcionamiento.
- Librería: en Arduino IDE instala “mcp_can by Cory J. Fowler” desde el Library Manager.
- Frecuencia del cristal: mira el grabado en el módulo: “8.000” = 8 MHz, “16.000” = 16 MHz. Ajusta en el código
MCP_8MHZoMCP_16MHZ. - Cargar este sketch (loopback):
#include <SPI.h>
#include "mcp_can.h"
const int CS_PIN = 10;
MCP_CAN CAN0(CS_PIN);
void setup() {
Serial.begin(115200);
while (!Serial) {}
// Cambia MCP_8MHZ por MCP_16MHZ si tu módulo es de 16 MHz.
if (CAN0.begin(MCP_ANY, CAN_500KBPS, MCP_8MHZ) != CAN_OK) {
Serial.println("Error: CAN no inició");
while (1) {}
}
// Modo loopback: lo que envío, lo recibo internamente
CAN0.setMode(MCP_LOOPBACK);
Serial.println("CAN en loopback @500kbps (8MHz)");
}
void loop() {
static uint8_t cnt = 0;
byte data[8];
for (uint8_t i = 0; i < 8; i++) data[i] = cnt + i;
// Enviar frame estándar ID 0x100 con 8 bytes
byte sndStat = CAN0.sendMsgBuf(0x100, 0, 8, data);
if (sndStat == CAN_OK) Serial.print("TX ok, cnt="), Serial.println(cnt);
else Serial.println("Fallo TX");
// Leer si llegó algo (en loopback debería llegar)
if (CAN0.checkReceive() == CAN_MSGAVAIL) {
long unsigned id;
unsigned char len;
unsigned char buf[8];
CAN0.readMsgBuf(&id, &len, buf);
Serial.print("RX id=0x"); Serial.print(id, HEX);
Serial.print(" dlc="); Serial.print(len);
Serial.print(" data:");
for (byte i = 0; i < len; i++) { Serial.print(" "); Serial.print(buf[i]); }
Serial.println();
}
cnt++;
delay(1000);
}
Prueba.
Verifica en el Monitor Serie que ves TX ok y RX con el mismo ID y datos. Si no:
- Cambia
MCP_8MHZ↔MCP_16MHZ. - Revisa CS=10 y pines SPI correctos.
- Asegura GND común y alimentación 5 V estable.
ENLACES EXTERNOS
| Peso | 0.007 kg |
|---|---|
| Dimensiones | 0.01 × 0.01 × 0.01 cm |
| USOS: | CONVERTIDORES |
| PROTOCOLOS DE COMUNICACIÓN: | CAN |
Solo los usuarios registrados que hayan comprado este producto pueden hacer una valoración.
También te recomendamos…




CABLES







Productos relacionados








Valoraciones
No hay valoraciones aún.