-
×
 LM386 Modulo Amplificador de Audio 200x 5V-12V
1 × $ 23.00
LM386 Modulo Amplificador de Audio 200x 5V-12V
1 × $ 23.00 -
×
 Limpiador Electrónico en Aerosol 454 ml SILIJET E-7 Plus
1 × $ 169.00
Limpiador Electrónico en Aerosol 454 ml SILIJET E-7 Plus
1 × $ 169.00 -
×
 SI4713 Modulo Transmisor FM 3-5V DC
1 × $ 172.00
SI4713 Modulo Transmisor FM 3-5V DC
1 × $ 172.00 -
×
 Espejo Reflectante 20x3mm para Máquina Láser CO2
1 × $ 183.00
Espejo Reflectante 20x3mm para Máquina Láser CO2
1 × $ 183.00 -
×
 LRS-200-12 Fuente Conmutada 12V 17A MEAN WELL
1 × $ 589.00
LRS-200-12 Fuente Conmutada 12V 17A MEAN WELL
1 × $ 589.00 -
×
 Cepillo de Alambre de Latón y Acero Inoxidable para Limpieza de Boquillas
1 × $ 39.00
Cepillo de Alambre de Latón y Acero Inoxidable para Limpieza de Boquillas
1 × $ 39.00 -
×
 UShieldX Shield de Expansión para Arduino UNO
1 × $ 456.00
UShieldX Shield de Expansión para Arduino UNO
1 × $ 456.00 -
×
 PShieldX Shield de Expansión para Raspberry Pi Pico
2 × $ 456.00
PShieldX Shield de Expansión para Raspberry Pi Pico
2 × $ 456.00 -
×
 Fuente para Protoboard con Señuelo de Carga UNIT
1 × $ 129.00
Fuente para Protoboard con Señuelo de Carga UNIT
1 × $ 129.00 -
×
 Raspberry Pi Pico 2 RP2350
1 × $ 155.00
Raspberry Pi Pico 2 RP2350
1 × $ 155.00 -
×
 Limpiador Dieléctrico para Circuitos y Tarjetas Electrónicas 454 ml COMPUKLIN
1 × $ 189.00
Limpiador Dieléctrico para Circuitos y Tarjetas Electrónicas 454 ml COMPUKLIN
1 × $ 189.00 -
×
 Conector Estéreo de 3.5mm 90 grados Niquelado Negro
1 × $ 16.00
Conector Estéreo de 3.5mm 90 grados Niquelado Negro
1 × $ 16.00 -
×
 Puntas para Multímetro de 1000V 10A
1 × $ 29.00
Puntas para Multímetro de 1000V 10A
1 × $ 29.00 -
×
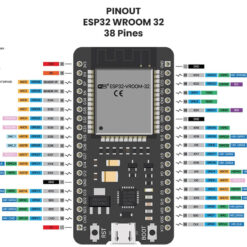
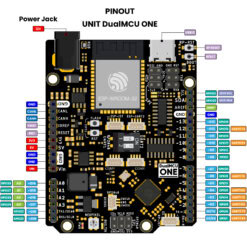
 UNIT DualMCU ONE ESP32 + RP2040
1 × $ 269.00
UNIT DualMCU ONE ESP32 + RP2040
1 × $ 269.00 -
×
 SYB-500 Protoboard 2700 Puntos
1 × $ 149.00
SYB-500 Protoboard 2700 Puntos
1 × $ 149.00 -
×
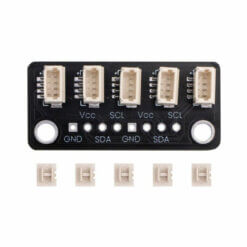 UNIT Módulo Hub I2C QW/ST 5 Puertos
1 × $ 26.00
UNIT Módulo Hub I2C QW/ST 5 Puertos
1 × $ 26.00 -
×
 TE-613 Tapete Silicon Térmico 35x25cm
1 × $ 113.00
TE-613 Tapete Silicon Térmico 35x25cm
1 × $ 113.00 -
×
 Eliminador 5V 3A USB C
1 × $ 65.00
Eliminador 5V 3A USB C
1 × $ 65.00 -
×
 Arduino Nano R4 32 bits RA4M1 CAN ABX00142
1 × $ 274.00
Arduino Nano R4 32 bits RA4M1 CAN ABX00142
1 × $ 274.00 -
×
 Antena FPC 5dBi 2.4Ghz WIFI o Bluetooth
1 × $ 21.00
Antena FPC 5dBi 2.4Ghz WIFI o Bluetooth
1 × $ 21.00 -
×
 Encoder Incremental Rotativo EC11 20mm
1 × $ 21.00
Encoder Incremental Rotativo EC11 20mm
1 × $ 21.00
Puede que estés interesado en…
-
Add
 TDA7294 Amplificador de Audio Mono 100W
$ 138.00
TDA7294 Amplificador de Audio Mono 100W
$ 138.00 -
Add
 TDA7297 Amplificador Audio de Doble Canal 12V DC 15W
$ 91.00
TDA7297 Amplificador Audio de Doble Canal 12V DC 15W
$ 91.00 -
Add
 1002 HiFi Amplificador Bluetooth Estereo 100W
$ 593.00
1002 HiFi Amplificador Bluetooth Estereo 100W
$ 593.00 -
Add
 502L Amplificador Bluetooth Estereo 50W
$ 150.00
502L Amplificador Bluetooth Estereo 50W
$ 150.00 -
Add
 PCM1808 Decodificador de Audio Estereo ADC 99dB SNR 24 Bits
$ 71.00
PCM1808 Decodificador de Audio Estereo ADC 99dB SNR 24 Bits
$ 71.00















































Valoraciones
No hay valoraciones aún.