-
×
 TTP223B Botón Táctil Capacitivo
1 × $ 14.00
TTP223B Botón Táctil Capacitivo
1 × $ 14.00 -
×
 Led Bicolor 3mm KY-029
1 × $ 25.00
Led Bicolor 3mm KY-029
1 × $ 25.00 -
×
 Teensy 4.0 Tarjeta de Desarrollo RT1062 Micro USB
1 × $ 836.00
Teensy 4.0 Tarjeta de Desarrollo RT1062 Micro USB
1 × $ 836.00 -
×
 Par de Cables Hembra Macho conector JST RC
1 × $ 8.00
Par de Cables Hembra Macho conector JST RC
1 × $ 8.00 -
×
 TPA3118 Modulo Amplificador 60W Mono Clase D
1 × $ 52.00
TPA3118 Modulo Amplificador 60W Mono Clase D
1 × $ 52.00 -
×
 CMI201209VR33KT Inductor de Ferrita 330nH 250mA
1 × $ 0.24
CMI201209VR33KT Inductor de Ferrita 330nH 250mA
1 × $ 0.24 -
×
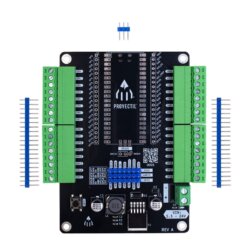 PShieldX Shield de Expansión para Raspberry Pi Pico
1 × $ 456.00
PShieldX Shield de Expansión para Raspberry Pi Pico
1 × $ 456.00
Puede que estés interesado en…
-
Add
 Raspberry Pi Pico 2 W RP2350
$ 249.00
Raspberry Pi Pico 2 W RP2350
$ 249.00 -
Add
 Raspberry Pi Pico 2 RP2350
$ 155.00
Raspberry Pi Pico 2 RP2350
$ 155.00 -
Add
 Flux Limpiador para Soldar 250 ML
$ 117.00
Flux Limpiador para Soldar 250 ML
$ 117.00 -
Add
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto
 UNO R3 SMD Compatible con Arduino Tipo C / MicroUSB
$ 96.00
UNO R3 SMD Compatible con Arduino Tipo C / MicroUSB
$ 96.00 -
Add
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto
 ESP32 DEVKIT V1 30 Pines USB-C/MicroUSB
Rango de precios: desde $ 117.00 hasta $ 131.00
ESP32 DEVKIT V1 30 Pines USB-C/MicroUSB
Rango de precios: desde $ 117.00 hasta $ 131.00


















Valoraciones
No hay valoraciones aún.