-
×
 Osciloscopio Digital DSO5102P 100 Mhz 2 Canales Hantek
1 × $ 8,687.00
Osciloscopio Digital DSO5102P 100 Mhz 2 Canales Hantek
1 × $ 8,687.00 -
×
 MYJG60W-1 AC 110V Fuente de Poder para Maquina Laser
1 × $ 3,122.00
MYJG60W-1 AC 110V Fuente de Poder para Maquina Laser
1 × $ 3,122.00 -
×
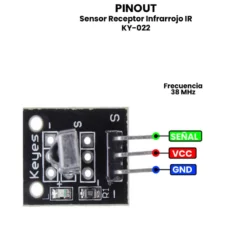
 Receptor Infrarrojo VS1838B IR Fototransistor
1 × $ 6.00
Receptor Infrarrojo VS1838B IR Fototransistor
1 × $ 6.00 -
×
 FG-100 Generador de Señales con Función DDS 1Hz-500KHz
1 × $ 470.00
FG-100 Generador de Señales con Función DDS 1Hz-500KHz
1 × $ 470.00 -
×
 ESP32 38 Pines ESP WROOM 32
1 × $ 147.00
ESP32 38 Pines ESP WROOM 32
1 × $ 147.00 -
×
 HDP135V6 Fuente de Alimentación 0-30V 6A 210W
1 × $ 2,266.00
HDP135V6 Fuente de Alimentación 0-30V 6A 210W
1 × $ 2,266.00 -
×
 Pelacables Autoajustable con Cortadora de Cable y Crimpado de Terminales
1 × $ 184.00
Pelacables Autoajustable con Cortadora de Cable y Crimpado de Terminales
1 × $ 184.00 -
×
 PIC18F2550-I/SP Microcontrolador 8 Bits DIP-28
1 × $ 264.00
PIC18F2550-I/SP Microcontrolador 8 Bits DIP-28
1 × $ 264.00 -
×
 Puntas para Multímetro de 1000V 10A
1 × $ 29.00
Puntas para Multímetro de 1000V 10A
1 × $ 29.00 -
×
 Pico Gravity Board V1.0 Placa de Expansión para Raspberry Pi Pico DFR0848
1 × $ 143.00
Pico Gravity Board V1.0 Placa de Expansión para Raspberry Pi Pico DFR0848
1 × $ 143.00 -
×
 Módulo Zumbador Pasivo 80 dB - UNIT DevLab
1 × $ 19.00
Módulo Zumbador Pasivo 80 dB - UNIT DevLab
1 × $ 19.00 -
×
 STM32F030F4P6 MCU Arm Cortex-M0 48MHz TSSOP-20
1 × $ 29.00
STM32F030F4P6 MCU Arm Cortex-M0 48MHz TSSOP-20
1 × $ 29.00 -
×
 MAX232IDR IC SMD Transceptor
1 × $ 23.00
MAX232IDR IC SMD Transceptor
1 × $ 23.00 -
×
 ESP8266EX SMD
1 × $ 21.18
ESP8266EX SMD
1 × $ 21.18 -
×
 Modulo De Potencia Mosfet 210a Cama Caliente Hot Bed 3d Cnc
1 × $ 69.00
Modulo De Potencia Mosfet 210a Cama Caliente Hot Bed 3d Cnc
1 × $ 69.00 -
×
 46204 Clavija Industrial Plástica Volteck
1 × $ 17.00
46204 Clavija Industrial Plástica Volteck
1 × $ 17.00 -
×
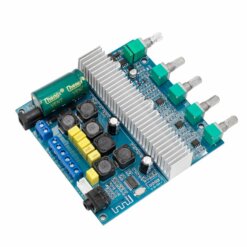 TPA3116 Amplificador Digital
1 × $ 431.00
TPA3116 Amplificador Digital
1 × $ 431.00 -
×
 Kit Terminal Preaislado tubular VE 2120 Piezas
1 × $ 189.00
Kit Terminal Preaislado tubular VE 2120 Piezas
1 × $ 189.00 -
×
 Gravity Kit de 37 Sensores Compatibles con Arduino KIT0150
1 × $ 3,082.00
Gravity Kit de 37 Sensores Compatibles con Arduino KIT0150
1 × $ 3,082.00 -
×
 Toallitas Húmedas para Limpieza de Equipos Electrónicos 30pcs COMPUTOALLAS
1 × $ 59.00
Toallitas Húmedas para Limpieza de Equipos Electrónicos 30pcs COMPUTOALLAS
1 × $ 59.00 -
×
 Kit Soldador Eléctrico 90W 110V Cautín Multímetro
1 × $ 539.00
Kit Soldador Eléctrico 90W 110V Cautín Multímetro
1 × $ 539.00 -
×
 Kit Reloj Electrónico Digital AT89C2051 4 Bits
1 × $ 83.00
Kit Reloj Electrónico Digital AT89C2051 4 Bits
1 × $ 83.00
Puede que estés interesado en…
-
Add
 UNIT Touchdot ESP32-S3 WiFi BT
$ 179.00
UNIT Touchdot ESP32-S3 WiFi BT
$ 179.00 -
Add
 Limpiador Dieléctrico para Circuitos y Tarjetas Electrónicas 454 ml COMPUKLIN
$ 189.00
Limpiador Dieléctrico para Circuitos y Tarjetas Electrónicas 454 ml COMPUKLIN
$ 189.00 -
Add
 Limpiador Electrónico en Aerosol 454 ml SILIJET E-7 Plus
$ 169.00
Limpiador Electrónico en Aerosol 454 ml SILIJET E-7 Plus
$ 169.00 -
Add
 Espuma Limpiadora para Equipos Electrónicos 454 ml SILIMPO
$ 99.00
Espuma Limpiadora para Equipos Electrónicos 454 ml SILIMPO
$ 99.00 -
Add
 Congelante Detector de Falla para Circuitos Electrónicos 170 ml SILIJET E-3
$ 109.00
Congelante Detector de Falla para Circuitos Electrónicos 170 ml SILIJET E-3
$ 109.00















Valoraciones
No hay valoraciones aún.