-
×
 RG6-305 Cable Coaxial 1m 75 Ohms C/50% Malla
3 × $ 6.00
RG6-305 Cable Coaxial 1m 75 Ohms C/50% Malla
3 × $ 6.00 -
×
 Esponja limpia Cautin
1 × $ 3.00
Esponja limpia Cautin
1 × $ 3.00 -
×
 Kit Conectores LT41 de Empalme Rápido 75pcs
1 × $ 208.00
Kit Conectores LT41 de Empalme Rápido 75pcs
1 × $ 208.00 -
×
 Espejo Reflectante 20x3mm para Máquina Láser CO2
1 × $ 183.00
Espejo Reflectante 20x3mm para Máquina Láser CO2
1 × $ 183.00 -
×
 RM99A Pinza Amperimétrica Digital
1 × $ 213.00
RM99A Pinza Amperimétrica Digital
1 × $ 213.00 -
×
 Matriz LED 8x8 3mm 1088AS
1 × $ 15.00
Matriz LED 8x8 3mm 1088AS
1 × $ 15.00 -
×
 Kit Soldador Eléctrico 90W 110V Cautín Multímetro
1 × $ 539.00
Kit Soldador Eléctrico 90W 110V Cautín Multímetro
1 × $ 539.00 -
×
 Pasta Térmica 5g
1 × $ 28.00
Pasta Térmica 5g
1 × $ 28.00 -
×
 Kit de Componentes Electrónicos Básicos Surtido de 7 Tipos
1 × $ 225.00
Kit de Componentes Electrónicos Básicos Surtido de 7 Tipos
1 × $ 225.00 -
×
 Sensor de Luz UV 290-390nm (UVA, UVB) RS485 SEN0642
1 × $ 1,376.00
Sensor de Luz UV 290-390nm (UVA, UVB) RS485 SEN0642
1 × $ 1,376.00 -
×
 Malla Desoldadora de Cobre 2mm 1.5m CP-2015
1 × $ 19.00
Malla Desoldadora de Cobre 2mm 1.5m CP-2015
1 × $ 19.00 -
×
 Sensor Infrarrojo Sharp GP2Y0A21YK0F de 10-80cm
1 × $ 141.00
Sensor Infrarrojo Sharp GP2Y0A21YK0F de 10-80cm
1 × $ 141.00 -
×
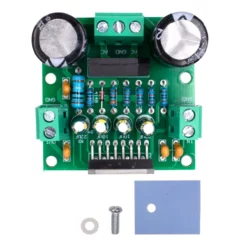 TDA7294 Amplificador de Audio Mono 100W
1 × $ 138.00
TDA7294 Amplificador de Audio Mono 100W
1 × $ 138.00 -
×
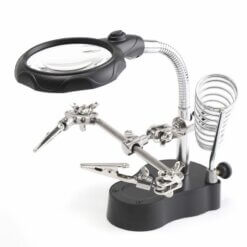 Lupa Con Luz Led Pinzas Base Para Cautín Reparar
1 × $ 139.00
Lupa Con Luz Led Pinzas Base Para Cautín Reparar
1 × $ 139.00 -
×
 Cautín de 60W 110V con Puntas Soporte y Esponja
1 × $ 124.00
Cautín de 60W 110V con Puntas Soporte y Esponja
1 × $ 124.00 -
×
 TP101 Kit Chasis de Robot Tanque
1 × $ 565.00
TP101 Kit Chasis de Robot Tanque
1 × $ 565.00 -
×
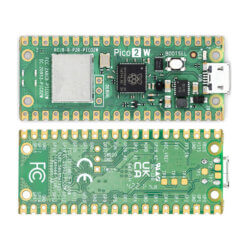 Raspberry Pi Pico 2 W RP2350
1 × $ 249.00
Raspberry Pi Pico 2 W RP2350
1 × $ 249.00 -
×
 Bluetooth 4.0 AT09 HM10 CC2541 BLE
1 × $ 82.00
Bluetooth 4.0 AT09 HM10 CC2541 BLE
1 × $ 82.00 -
×
 FG-100 Generador de Señales con Función DDS 1Hz-500KHz
1 × $ 470.00
FG-100 Generador de Señales con Función DDS 1Hz-500KHz
1 × $ 470.00
Puede que estés interesado en…
-
Add
 Kit Pinza de Compresión para Cable Coaxial RG59/RG6 con Pelador Giratorio + 20 Conectores
$ 179.00
Kit Pinza de Compresión para Cable Coaxial RG59/RG6 con Pelador Giratorio + 20 Conectores
$ 179.00 -
Add
 Puntas para Multímetro de 1000V 10A
$ 29.00
Puntas para Multímetro de 1000V 10A
$ 29.00 -
Add
 Pelador de Cables Coaxiales Giratorio
$ 35.00
Pelador de Cables Coaxiales Giratorio
$ 35.00 -
Add
 UNIT Placa de Expansión para Raspberry Pi Pico
$ 79.00
UNIT Placa de Expansión para Raspberry Pi Pico
$ 79.00 -
Add
 UNIT DualMCU ONE ESP32 + RP2040
$ 269.00
UNIT DualMCU ONE ESP32 + RP2040
$ 269.00
















Valoraciones
No hay valoraciones aún.