-
×
 PICkit 3 Programador Universal PIC con Interfaz ICSP
1 × $ 390.00
PICkit 3 Programador Universal PIC con Interfaz ICSP
1 × $ 390.00 -
×
 Lilypad ATmega32U4 USB Compatible con Arduino
1 × $ 163.00
Lilypad ATmega32U4 USB Compatible con Arduino
1 × $ 163.00 -
×
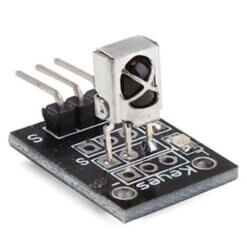
 Receptor Infrarrojo VS1838B IR Fototransistor
1 × $ 6.00
Receptor Infrarrojo VS1838B IR Fototransistor
1 × $ 6.00 -
×
 Llavero Tag RFID 13.56 MHz NFC
1 × $ 7.00
Llavero Tag RFID 13.56 MHz NFC
1 × $ 7.00 -
×
 Gravity Kit de 37 Sensores Compatibles con Arduino KIT0150
1 × $ 3,082.00
Gravity Kit de 37 Sensores Compatibles con Arduino KIT0150
1 × $ 3,082.00 -
×
 Kit de Leds 3mm 500 pz
1 × $ 125.00
Kit de Leds 3mm 500 pz
1 × $ 125.00 -
×
 Bateria LiPo 3.7V 650mAh 802040
1 × $ 71.00
Bateria LiPo 3.7V 650mAh 802040
1 × $ 71.00 -
×
 TE-613 Tapete Silicon Térmico 35x25cm
1 × $ 113.00
TE-613 Tapete Silicon Térmico 35x25cm
1 × $ 113.00 -
×
 Cargador Balanceador IMAX B6AC 80W
1 × $ 646.00
Cargador Balanceador IMAX B6AC 80W
1 × $ 646.00 -
×
 Raspberry Pi Pico W
1 × $ 208.00
Raspberry Pi Pico W
1 × $ 208.00 -
×
 Adaptadores BNC Macho y Hembra con Terminal Atornillable
1 × $ 35.00
Adaptadores BNC Macho y Hembra con Terminal Atornillable
1 × $ 35.00 -
×
 CAU-118 Punta Conica para Cautin CAU-105 y CAU-115
1 × $ 16.00
CAU-118 Punta Conica para Cautin CAU-105 y CAU-115
1 × $ 16.00 -
×
 Sensor de Gestos y Detección de Rostros con AI SEN0626
2 × $ 445.00
Sensor de Gestos y Detección de Rostros con AI SEN0626
2 × $ 445.00 -
×
 Cable Banana Caiman Negro Rojo 1m
1 × $ 19.00
Cable Banana Caiman Negro Rojo 1m
1 × $ 19.00 -
×
 Limpiador de Alambre para Puntas de Cautín
1 × $ 70.00
Limpiador de Alambre para Puntas de Cautín
1 × $ 70.00
Puede que estés interesado en…






























Valoraciones
No hay valoraciones aún.