-
×
 Toallitas Húmedas para Limpieza de Equipos Electrónicos 30pcs COMPUTOALLAS
1 × $ 59.00
Toallitas Húmedas para Limpieza de Equipos Electrónicos 30pcs COMPUTOALLAS
1 × $ 59.00 -
×
 Controlador de Velocidad 6-30V 6A Reversible Motor DC PWM
1 × $ 121.00
Controlador de Velocidad 6-30V 6A Reversible Motor DC PWM
1 × $ 121.00 -
×
 CAU-118 Punta Conica para Cautin CAU-105 y CAU-115
1 × $ 16.00
CAU-118 Punta Conica para Cautin CAU-105 y CAU-115
1 × $ 16.00 -
×
 TCC0603COG101J500CT Capacitor Cerámico 0603 100pF 50V
1 × $ 1.00
TCC0603COG101J500CT Capacitor Cerámico 0603 100pF 50V
1 × $ 1.00 -
×
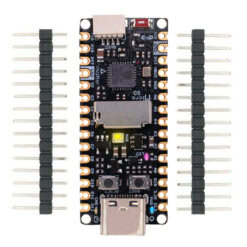 UNIT Pulsar ESP32-C6
1 × $ 189.00
UNIT Pulsar ESP32-C6
1 × $ 189.00 -
×
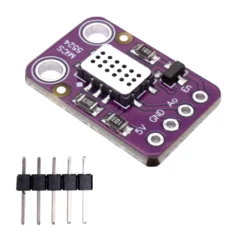 MICS-5524 Sensor de Calidad del Aire
1 × $ 174.00
MICS-5524 Sensor de Calidad del Aire
1 × $ 174.00 -
×
 7 Botellas de Soldadura de Estaño y Plomo BGA para Reballing
1 × $ 229.00
7 Botellas de Soldadura de Estaño y Plomo BGA para Reballing
1 × $ 229.00 -
×
 Espuma Limpiadora para Equipos Electrónicos 454 ml SILIMPO
1 × $ 99.00
Espuma Limpiadora para Equipos Electrónicos 454 ml SILIMPO
1 × $ 99.00 -
×
 Limpiador Dieléctrico para Circuitos y Tarjetas Electrónicas 454 ml COMPUKLIN
1 × $ 189.00
Limpiador Dieléctrico para Circuitos y Tarjetas Electrónicas 454 ml COMPUKLIN
1 × $ 189.00 -
×
 R502AW Sensor Dactilar TTL
1 × $ 401.11
R502AW Sensor Dactilar TTL
1 × $ 401.11 -
×
 TP101 Kit Chasis de Robot Tanque
1 × $ 565.00
TP101 Kit Chasis de Robot Tanque
1 × $ 565.00 -
×
 PZEM-031 Voltimetro Digital LCD 100V 20A
1 × $ 286.00
PZEM-031 Voltimetro Digital LCD 100V 20A
1 × $ 286.00 -
×
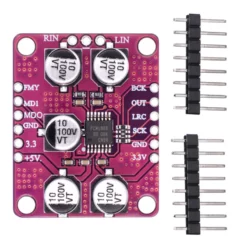 PCM1808 Decodificador de Audio Estereo ADC 99dB SNR 24 Bits
1 × $ 71.00
PCM1808 Decodificador de Audio Estereo ADC 99dB SNR 24 Bits
1 × $ 71.00 -
×
 Raspberry Pi Pico 2 RP2350
1 × $ 155.00
Raspberry Pi Pico 2 RP2350
1 × $ 155.00 -
×
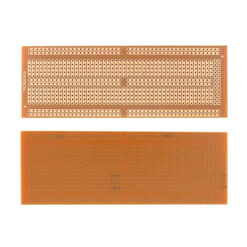 Placa Perforada Tipo Protoboard 48 x 133 mm
1 × $ 15.00
Placa Perforada Tipo Protoboard 48 x 133 mm
1 × $ 15.00 -
×
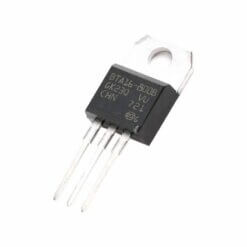 Triac BTA16 800B
1 × $ 10.00
Triac BTA16 800B
1 × $ 10.00 -
×
 Clip Analizador Lógico IC de Doble Gancho 10pcs
1 × $ 283.00
Clip Analizador Lógico IC de Doble Gancho 10pcs
1 × $ 283.00 -
×
 MT3608 Elevador de Voltaje Boost Step Up 6W 2A
1 × $ 21.00
MT3608 Elevador de Voltaje Boost Step Up 6W 2A
1 × $ 21.00
Puede que estés interesado en…
-
Add
 CAU-115A Cautin Tipo Lapiz de 35W 127V con Accesorios
$ 159.00
CAU-115A Cautin Tipo Lapiz de 35W 127V con Accesorios
$ 159.00 -
Add
 Limpiador Electrónico en Aerosol 454 ml SILIJET E-7 Plus
$ 169.00
Limpiador Electrónico en Aerosol 454 ml SILIJET E-7 Plus
$ 169.00 -
Add
 Congelante Detector de Falla para Circuitos Electrónicos 170 ml SILIJET E-3
$ 109.00
Congelante Detector de Falla para Circuitos Electrónicos 170 ml SILIJET E-3
$ 109.00 -
Add
 Limpiador y Lubricante para Equipos Electrónicos en Aerosol 170 ml SILIJET E-PLUS
$ 89.00
Limpiador y Lubricante para Equipos Electrónicos en Aerosol 170 ml SILIJET E-PLUS
$ 89.00 -
Add
 Limpiador de Pantallas 170 ml COMPUSTAT
$ 79.00
Limpiador de Pantallas 170 ml COMPUSTAT
$ 79.00













Valoraciones
No hay valoraciones aún.