-
×
 R502AW Sensor Dactilar TTL
1 × $ 401.11
R502AW Sensor Dactilar TTL
1 × $ 401.11 -
×
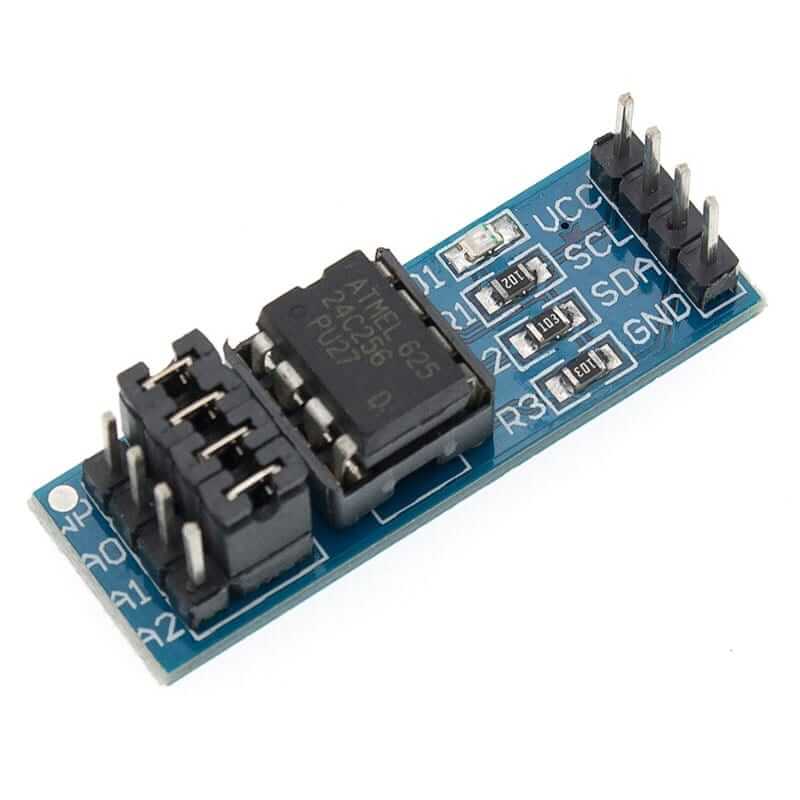
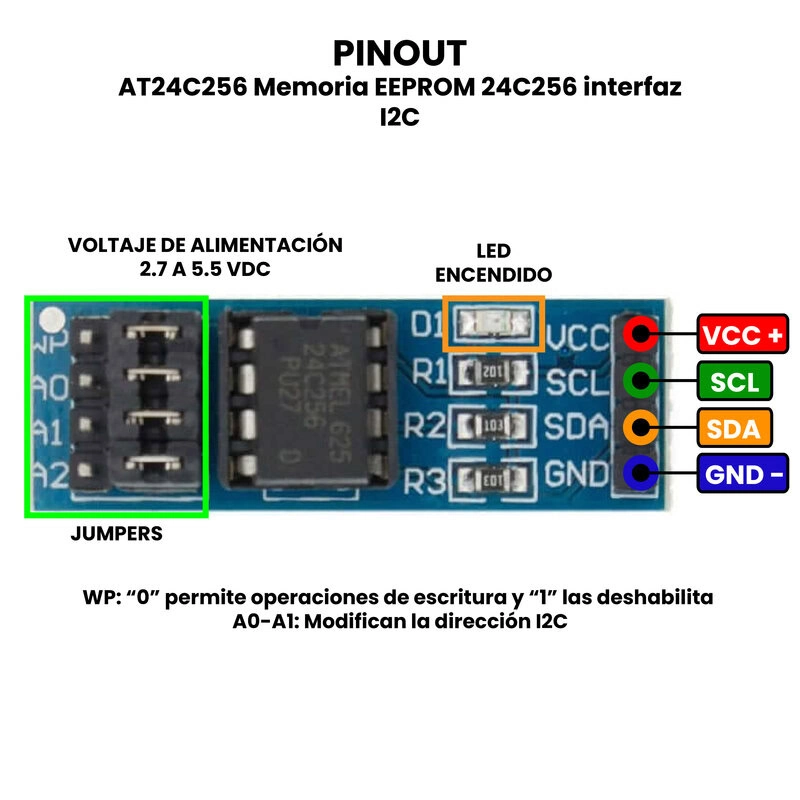
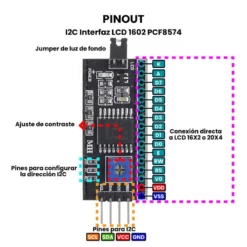
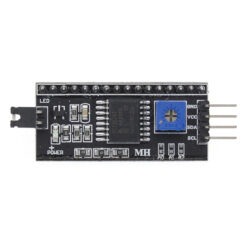 I2C Interfaz LCD 1602 PCF8574
1 × $ 20.00
I2C Interfaz LCD 1602 PCF8574
1 × $ 20.00 -
×
 Sensor Micrófono KY-038
1 × $ 19.00
Sensor Micrófono KY-038
1 × $ 19.00 -
×
 46204 Clavija Industrial Plástica Volteck
1 × $ 17.00
46204 Clavija Industrial Plástica Volteck
1 × $ 17.00 -
×
 HT1621M IC SMD
1 × $ 3.67
HT1621M IC SMD
1 × $ 3.67 -
×
 TTP223B Botón Táctil Capacitivo
1 × $ 14.00
TTP223B Botón Táctil Capacitivo
1 × $ 14.00 -
×
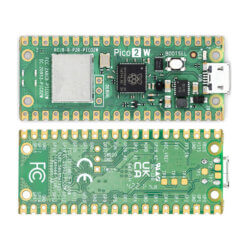 Raspberry Pi Pico 2 W RP2350
1 × $ 249.00
Raspberry Pi Pico 2 W RP2350
1 × $ 249.00 -
×
 Soldador de Gas Tipo Bolígrafo con Accesorios
1 × $ 290.00
Soldador de Gas Tipo Bolígrafo con Accesorios
1 × $ 290.00 -
×
 Pinzas de Microcorte 5''
1 × $ 47.00
Pinzas de Microcorte 5''
1 × $ 47.00 -
×
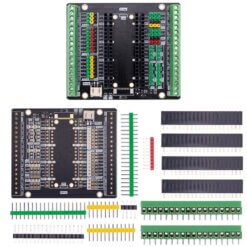 UNIT Placa de Expansión para Raspberry Pi Pico
1 × $ 79.00
UNIT Placa de Expansión para Raspberry Pi Pico
1 × $ 79.00 -
×
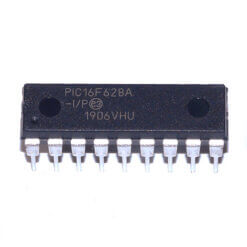 PIC16F628A-I/P Microcontrolador 8 Bits DIP-18
1 × $ 65.00
PIC16F628A-I/P Microcontrolador 8 Bits DIP-18
1 × $ 65.00 -
×
 Lilypad ATmega32U4 USB Compatible con Arduino
1 × $ 163.00
Lilypad ATmega32U4 USB Compatible con Arduino
1 × $ 163.00 -
×
 Raspberry Pi Pico 2 RP2350
1 × $ 155.00
Raspberry Pi Pico 2 RP2350
1 × $ 155.00 -
×
 Set de Pinzas con Punta de Cerámica
1 × $ 113.00
Set de Pinzas con Punta de Cerámica
1 × $ 113.00 -
×
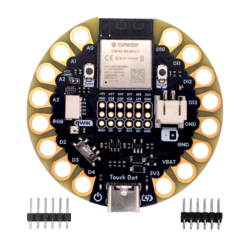 UNIT Touchdot ESP32-S3 WiFi BT
1 × $ 179.00
UNIT Touchdot ESP32-S3 WiFi BT
1 × $ 179.00 -
×
 Malla Desoldadora de Cobre 2mm 1.5m CP-2015
1 × $ 19.00
Malla Desoldadora de Cobre 2mm 1.5m CP-2015
1 × $ 19.00 -
×
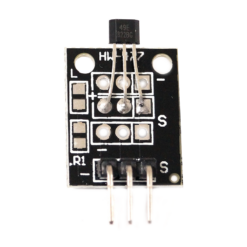 Sensor Magnético Analógico 49E KY-035
1 × $ 16.00
Sensor Magnético Analógico 49E KY-035
1 × $ 16.00 -
×
 TE-613 Tapete Silicon Térmico 35x25cm
1 × $ 113.00
TE-613 Tapete Silicon Térmico 35x25cm
1 × $ 113.00 -
×
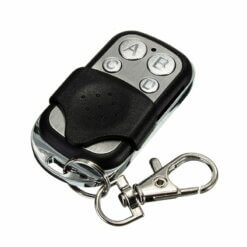 Sonoff RF Control Remoto 433 Mhz Sin Función de Clonación
1 × $ 85.00
Sonoff RF Control Remoto 433 Mhz Sin Función de Clonación
1 × $ 85.00 -
×
 Soldador de Gas Tipo Bolígrafo
1 × $ 180.00
Soldador de Gas Tipo Bolígrafo
1 × $ 180.00 -
×
 Banda Dentada GT2 2GT 10mm 10 Metros
1 × $ 215.00
Banda Dentada GT2 2GT 10mm 10 Metros
1 × $ 215.00 -
×
 MT3608 Elevador de Voltaje Boost Step Up 6W 2A
1 × $ 21.00
MT3608 Elevador de Voltaje Boost Step Up 6W 2A
1 × $ 21.00
Puede que estés interesado en…
-
Add
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto
 Cable de Datos y Carga Rápida de 120W Tipo C con Pantalla Led
Rango de precios: desde $ 79.00 hasta $ 88.00
Cable de Datos y Carga Rápida de 120W Tipo C con Pantalla Led
Rango de precios: desde $ 79.00 hasta $ 88.00 -
Add
 PShieldX Shield de Expansión para Raspberry Pi Pico
$ 456.00
PShieldX Shield de Expansión para Raspberry Pi Pico
$ 456.00 -
Add
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto
 Protoboard de 400pts y 830pts Blanco o Transparente
Rango de precios: desde $ 16.00 hasta $ 44.00
Protoboard de 400pts y 830pts Blanco o Transparente
Rango de precios: desde $ 16.00 hasta $ 44.00 -
Add
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto
 Tira Header Hembra 2.54mm Diferentes Pines
Rango de precios: desde $ 2.00 hasta $ 5.00
Tira Header Hembra 2.54mm Diferentes Pines
Rango de precios: desde $ 2.00 hasta $ 5.00 -
Add
 Placa Perforada Tipo Protoboard 48 x 133 mm
$ 15.00
Placa Perforada Tipo Protoboard 48 x 133 mm
$ 15.00






















Valoraciones
No hay valoraciones aún.