-
×
 Espuma Limpiadora para Equipos Electrónicos 454 ml SILIMPO
1 × $ 99.00
Espuma Limpiadora para Equipos Electrónicos 454 ml SILIMPO
1 × $ 99.00 -
×
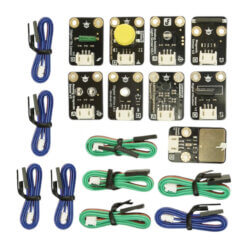 Gravity Kit de 9 Sensores Compatibles con Arduino DFR0018
1 × $ 601.00
Gravity Kit de 9 Sensores Compatibles con Arduino DFR0018
1 × $ 601.00 -
×
 Pasta Limpiadora para Puntas de Cautín 6g
1 × $ 34.00
Pasta Limpiadora para Puntas de Cautín 6g
1 × $ 34.00 -
×
 Pluma Flux 951 Kester 10ml Non Clean
1 × $ 59.00
Pluma Flux 951 Kester 10ml Non Clean
1 × $ 59.00 -
×
 Set de Pinzas con Punta de Cerámica
1 × $ 113.00
Set de Pinzas con Punta de Cerámica
1 × $ 113.00 -
×
 CC0603JRNPO9BN470 Capacitor Cerámico 0603 47pF 50V
1 × $ 0.14
CC0603JRNPO9BN470 Capacitor Cerámico 0603 47pF 50V
1 × $ 0.14 -
×
 UNIT Maker UNO – Nivel Básico con 16 Proyectos
1 × $ 349.00
UNIT Maker UNO – Nivel Básico con 16 Proyectos
1 × $ 349.00
Puede que estés interesado en…
-
Add
 MiniBotDS2 Kit Robot Programable
$ 1,399.00
MiniBotDS2 Kit Robot Programable
$ 1,399.00 -
Add
 Toallitas Húmedas para Limpieza de Equipos Electrónicos 30pcs COMPUTOALLAS
$ 59.00
Toallitas Húmedas para Limpieza de Equipos Electrónicos 30pcs COMPUTOALLAS
$ 59.00 -
Add
 Limpiador Dieléctrico para Circuitos y Tarjetas Electrónicas 454 ml COMPUKLIN
$ 189.00
Limpiador Dieléctrico para Circuitos y Tarjetas Electrónicas 454 ml COMPUKLIN
$ 189.00 -
Add
 Limpiador Electrónico en Aerosol 454 ml SILIJET E-7 Plus
$ 169.00
Limpiador Electrónico en Aerosol 454 ml SILIJET E-7 Plus
$ 169.00 -
Add
 Congelante Detector de Falla para Circuitos Electrónicos 170 ml SILIJET E-3
$ 109.00
Congelante Detector de Falla para Circuitos Electrónicos 170 ml SILIJET E-3
$ 109.00





































Valoraciones
No hay valoraciones aún.