-
×
 Kit Agujas de 0.15-0.35mm para Limpieza de Boquillas
1 × $ 72.00
Kit Agujas de 0.15-0.35mm para Limpieza de Boquillas
1 × $ 72.00 -
×
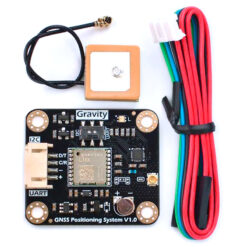 TEL0157 Receptor BeiDou GNSS GPS I2C y UART
1 × $ 410.00
TEL0157 Receptor BeiDou GNSS GPS I2C y UART
1 × $ 410.00 -
×
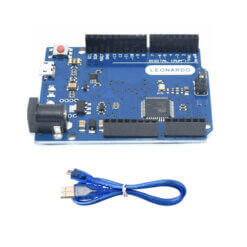 Leonardo R3 MEGA32U4 + cable USB compatible con Arduino
1 × $ 161.00
Leonardo R3 MEGA32U4 + cable USB compatible con Arduino
1 × $ 161.00 -
×
 Caja de Capacitores SMD 0402 83 Valores
1 × $ 3,763.00
Caja de Capacitores SMD 0402 83 Valores
1 × $ 3,763.00 -
×
 Mini Cargador USB Tipo-C 5V 2A
1 × $ 33.00
Mini Cargador USB Tipo-C 5V 2A
1 × $ 33.00 -
×
 Carcasa de Plástico ABS para Raspberry Pi 4B Color Negro
1 × $ 89.00
Carcasa de Plástico ABS para Raspberry Pi 4B Color Negro
1 × $ 89.00 -
×
 Fuente de Alimentación Universal 3V-24V 2A 48W
1 × $ 176.00
Fuente de Alimentación Universal 3V-24V 2A 48W
1 × $ 176.00 -
×
 Malla Desoldadora de Cobre 2mm 1.5m CP-2015
2 × $ 19.00
Malla Desoldadora de Cobre 2mm 1.5m CP-2015
2 × $ 19.00 -
×
 Adaptador de Batería XT60 Hembra a T Macho ESC
1 × $ 30.00
Adaptador de Batería XT60 Hembra a T Macho ESC
1 × $ 30.00
Puede que estés interesado en…
-
Add
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto
 Conector Neumático Rápido
Rango de precios: desde $ 14.00 hasta $ 15.00
Conector Neumático Rápido
Rango de precios: desde $ 14.00 hasta $ 15.00 -
Add
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto
 Boquilla de 0.4mm MK8 de Latón o Acero Endurecido
Rango de precios: desde $ 12.00 hasta $ 33.00
Boquilla de 0.4mm MK8 de Latón o Acero Endurecido
Rango de precios: desde $ 12.00 hasta $ 33.00 -
Add
 UNIT Cargador de Batería LiPo Boost & I2C
$ 69.00
UNIT Cargador de Batería LiPo Boost & I2C
$ 69.00 -
Add
 Estación de Soldadura con Brazos Flexibles
El precio original era: $ 809.00.$ 728.00El precio actual es: $ 728.00.
Estación de Soldadura con Brazos Flexibles
El precio original era: $ 809.00.$ 728.00El precio actual es: $ 728.00. -
Add
 Flux Limpiador para Soldar 250 ML
$ 117.00
Flux Limpiador para Soldar 250 ML
$ 117.00



















Valoraciones
No hay valoraciones aún.