-
×
 Mini Taladro Eléctrico 12V 12000 RPM con Accesorios y Caja
1 × $ 219.00
Mini Taladro Eléctrico 12V 12000 RPM con Accesorios y Caja
1 × $ 219.00 -
×
 Cautín de 90W 110V con Puntas Soporte y Esponja
1 × $ 283.00
Cautín de 90W 110V con Puntas Soporte y Esponja
1 × $ 283.00 -
×
 Cable UTP Categoría 5e Calibre 24AWG 1 Metro Color Gris
1 × $ 11.00
Cable UTP Categoría 5e Calibre 24AWG 1 Metro Color Gris
1 × $ 11.00 -
×
 Sensor de Gestos y Detección de Rostros con AI SEN0626
1 × $ 445.00
Sensor de Gestos y Detección de Rostros con AI SEN0626
1 × $ 445.00 -
×
 Modulo WiFi ESP8266 ESP-12F
1 × $ 53.00
Modulo WiFi ESP8266 ESP-12F
1 × $ 53.00 -
×
 DP-366D Desoldador de Succión
1 × $ 49.00
DP-366D Desoldador de Succión
1 × $ 49.00 -
×
 Robot Zumo 2040 Ensamblado con Motores 75:1 HP
1 × $ 4,399.00
Robot Zumo 2040 Ensamblado con Motores 75:1 HP
1 × $ 4,399.00 -
×
 SN65HVD230 Transceptor CAN 3.3V
1 × $ 35.00
SN65HVD230 Transceptor CAN 3.3V
1 × $ 35.00 -
×
 UNIT MICROPIC4550 - Modulo de Desarrollo PIC18F4550
1 × $ 386.00
UNIT MICROPIC4550 - Modulo de Desarrollo PIC18F4550
1 × $ 386.00 -
×
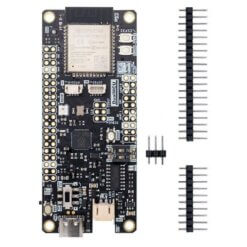
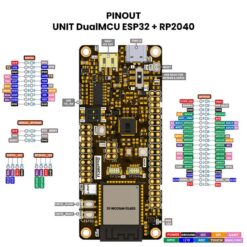
 UNIT DualMCU ONE ESP32 + RP2040
1 × $ 269.00
UNIT DualMCU ONE ESP32 + RP2040
1 × $ 269.00 -
×
 UNIT Kit ESP32 Básico con 10 practicas
1 × $ 269.00
UNIT Kit ESP32 Básico con 10 practicas
1 × $ 269.00
Puede que estés interesado en…
-
Add
 Pasta Limpiadora para Puntas de Cautín 6g
$ 34.00
Pasta Limpiadora para Puntas de Cautín 6g
$ 34.00 -
Add
 CAU-115A Cautin Tipo Lapiz de 35W 127V con Accesorios
$ 159.00
CAU-115A Cautin Tipo Lapiz de 35W 127V con Accesorios
$ 159.00 -
Add
 HB-019 Desoldador de Succión Eléctrico 36W 110V
$ 139.00
HB-019 Desoldador de Succión Eléctrico 36W 110V
$ 139.00 -
Add
 Gravity Kit de 37 Sensores Compatibles con Arduino KIT0150
$ 3,082.00
Gravity Kit de 37 Sensores Compatibles con Arduino KIT0150
$ 3,082.00 -
Add
 Protoboard de 400pts y 830pts Blanco o Transparente
$ 27.00
Protoboard de 400pts y 830pts Blanco o Transparente
$ 27.00
























Valoraciones
No hay valoraciones aún.