-
×
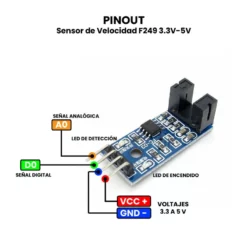
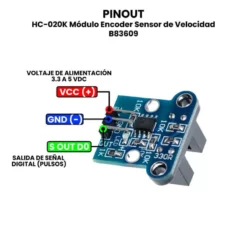
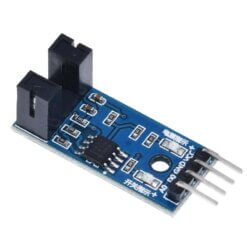 Sensor de Velocidad F249 3.3V-5V
1 × $ 22.00
Sensor de Velocidad F249 3.3V-5V
1 × $ 22.00
Puede que estés interesado en…
-
Add
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto
 UNO R4 Placa de Desarrollo USB Tipo C WiFi ESP32 / Mínima
Rango de precios: desde $ 193.00 hasta $ 326.00
UNO R4 Placa de Desarrollo USB Tipo C WiFi ESP32 / Mínima
Rango de precios: desde $ 193.00 hasta $ 326.00 -
Add
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto
 UNO R3 SMD Compatible con Arduino Tipo C / MicroUSB
$ 96.00
UNO R3 SMD Compatible con Arduino Tipo C / MicroUSB
$ 96.00 -
Add
Este producto tiene múltiples variantes. Las opciones se pueden elegir en la página de producto
 Nano ATMEGA328P Tarjeta de Desarrollo
Rango de precios: desde $ 39.00 hasta $ 148.00
Nano ATMEGA328P Tarjeta de Desarrollo
Rango de precios: desde $ 39.00 hasta $ 148.00 -
Add
 Due Core ATmel Arm compatible con Arduino
$ 457.00
Due Core ATmel Arm compatible con Arduino
$ 457.00 -
Add
 Lilypad ATmega32U4 USB Compatible con Arduino
$ 163.00
Lilypad ATmega32U4 USB Compatible con Arduino
$ 163.00






















Valoraciones
No hay valoraciones aún.