-
×
 Limpiador Electrónico en Aerosol 454 ml SILIJET E-7 Plus
1 × $ 169.00
Limpiador Electrónico en Aerosol 454 ml SILIJET E-7 Plus
1 × $ 169.00 -
×
 Sensor de Corriente ACS712 30A
1 × $ 30.00
Sensor de Corriente ACS712 30A
1 × $ 30.00 -
×
 Disipadores de Calor Compatibles para Raspberry Pi 4B
1 × $ 25.00
Disipadores de Calor Compatibles para Raspberry Pi 4B
1 × $ 25.00 -
×
 ATTINY85-20PU Microcontrolador 8 Bits DIP-8
1 × $ 104.00
ATTINY85-20PU Microcontrolador 8 Bits DIP-8
1 × $ 104.00 -
×
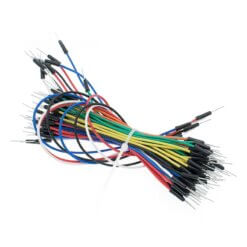 65 Cables Macho-Macho para Protoboard
1 × $ 31.00
65 Cables Macho-Macho para Protoboard
1 × $ 31.00 -
×
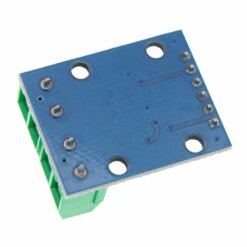
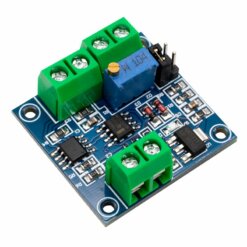 Convertidor de Voltaje a PWM 0-10V a 0%-100% V-PWM
1 × $ 46.00
Convertidor de Voltaje a PWM 0-10V a 0%-100% V-PWM
1 × $ 46.00 -
×
 Soldador de Gas Tipo Bolígrafo
1 × $ 180.00
Soldador de Gas Tipo Bolígrafo
1 × $ 180.00 -
×
 UNIT Cargador de Batería LiPo Boost & I2C
1 × $ 69.00
UNIT Cargador de Batería LiPo Boost & I2C
1 × $ 69.00 -
×
 Sonoff ZBMINIL2 Interruptor Extreme Zigbee Sin Neutro
1 × $ 238.00
Sonoff ZBMINIL2 Interruptor Extreme Zigbee Sin Neutro
1 × $ 238.00 -
×
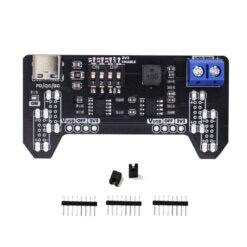 Fuente para Protoboard con Señuelo de Carga UNIT
1 × $ 129.00
Fuente para Protoboard con Señuelo de Carga UNIT
1 × $ 129.00 -
×
 Par Cables XT60 12AWG 15cm
1 × $ 75.00
Par Cables XT60 12AWG 15cm
1 × $ 75.00 -
×
 Buzzer Pasivo KY-006
1 × $ 13.00
Buzzer Pasivo KY-006
1 × $ 13.00 -
×
 MAX4466 Amplificador de Microfono Electret
1 × $ 48.00
MAX4466 Amplificador de Microfono Electret
1 × $ 48.00 -
×
 DHT11 con Interfaz para ESP8266
1 × $ 51.00
DHT11 con Interfaz para ESP8266
1 × $ 51.00 -
×
 Boquilla E3DV6 De 0.4mm Impresora 3d, 1.75mm, Nozzle, Reprap
1 × $ 12.00
Boquilla E3DV6 De 0.4mm Impresora 3d, 1.75mm, Nozzle, Reprap
1 × $ 12.00 -
×
 Kit Terminal Preaislado tubular VE 2120 Piezas
1 × $ 189.00
Kit Terminal Preaislado tubular VE 2120 Piezas
1 × $ 189.00 -
×
 Kit de Transistores TO-92 180 Piezas 18 Valores
1 × $ 69.00
Kit de Transistores TO-92 180 Piezas 18 Valores
1 × $ 69.00 -
×
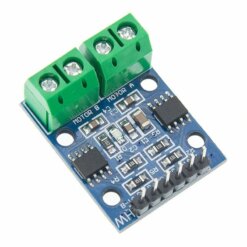 Puente H L9110s Driver P/2 Motores A Pasos
1 × $ 22.00
Puente H L9110s Driver P/2 Motores A Pasos
1 × $ 22.00 -
×
 NanoKVM Full IP-KVM RISC-V
1 × $ 2,379.00
NanoKVM Full IP-KVM RISC-V
1 × $ 2,379.00 -
×
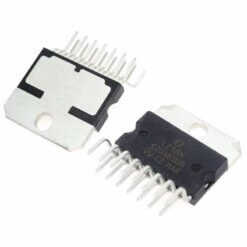
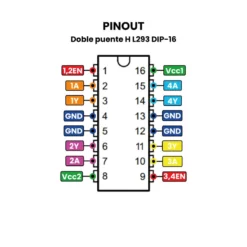
 L293D Shield Controlador de Motor
1 × $ 70.00
L293D Shield Controlador de Motor
1 × $ 70.00
Puede que estés interesado en…
-
Add
 Arduino Nano R4 32 bits RA4M1 CAN ABX00142
$ 274.00
Arduino Nano R4 32 bits RA4M1 CAN ABX00142
$ 274.00 -
Add
 Toallitas Húmedas para Limpieza de Equipos Electrónicos 30pcs COMPUTOALLAS
$ 59.00
Toallitas Húmedas para Limpieza de Equipos Electrónicos 30pcs COMPUTOALLAS
$ 59.00 -
Add
 Limpiador Dieléctrico para Circuitos y Tarjetas Electrónicas 454 ml COMPUKLIN
$ 189.00
Limpiador Dieléctrico para Circuitos y Tarjetas Electrónicas 454 ml COMPUKLIN
$ 189.00 -
Add
 Espuma Limpiadora para Equipos Electrónicos 454 ml SILIMPO
$ 99.00
Espuma Limpiadora para Equipos Electrónicos 454 ml SILIMPO
$ 99.00 -
Add
 Congelante Detector de Falla para Circuitos Electrónicos 170 ml SILIJET E-3
$ 109.00
Congelante Detector de Falla para Circuitos Electrónicos 170 ml SILIJET E-3
$ 109.00
























Valoraciones
No hay valoraciones aún.