-
×
 Broadlink RM4C Mini Control Remoto Google Home Alexa
1 × $ 329.00
Broadlink RM4C Mini Control Remoto Google Home Alexa
1 × $ 329.00 -
×
 Grove Beginner Kit 12 Practicas Compatible con Arduino
1 × $ 580.00
Grove Beginner Kit 12 Practicas Compatible con Arduino
1 × $ 580.00 -
×
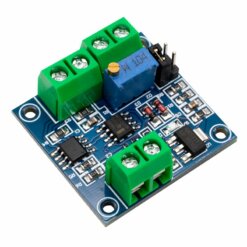 Convertidor de Voltaje a PWM 0-10V a 0%-100% V-PWM
1 × $ 46.00
Convertidor de Voltaje a PWM 0-10V a 0%-100% V-PWM
1 × $ 46.00 -
×
 74HC595 Registro de Desplazamiento SN74HC595N
1 × $ 7.00
74HC595 Registro de Desplazamiento SN74HC595N
1 × $ 7.00 -
×
 TCC0603COG101J500CT Capacitor Cerámico 0603 100pF 50V
1 × $ 1.00
TCC0603COG101J500CT Capacitor Cerámico 0603 100pF 50V
1 × $ 1.00 -
×
 LM358N Amplificador Operacional PDIP−8
1 × $ 5.00
LM358N Amplificador Operacional PDIP−8
1 × $ 5.00
Puede que estés interesado en…
-
Add
 Arduino Nano R4 32 bits RA4M1 CAN ABX00142
$ 274.00
Arduino Nano R4 32 bits RA4M1 CAN ABX00142
$ 274.00 -
Add
 Arduino Nano Matter BLE
$ 476.00
Arduino Nano Matter BLE
$ 476.00 -
Add
 TP101 Kit Chasis de Robot Tanque
$ 565.00
TP101 Kit Chasis de Robot Tanque
$ 565.00 -
Add
 Kit Brazo Robótico 6DOF con Garra y Servos
$ 1,040.00
Kit Brazo Robótico 6DOF con Garra y Servos
$ 1,040.00 -
Add
 Kit Chasis de Metal MC300 con Llantas Omnidireccional + Joystick
$ 2,799.00
Kit Chasis de Metal MC300 con Llantas Omnidireccional + Joystick
$ 2,799.00