-
×
 Clip Analizador Lógico IC de Doble Gancho 10pcs
1 × $288.00
Clip Analizador Lógico IC de Doble Gancho 10pcs
1 × $288.00 -
×
 Elevador de Voltaje Boost 200W 10A
1 × $125.00
Elevador de Voltaje Boost 200W 10A
1 × $125.00 -
×
Inductor de Ferrita 330uH 1.2 A 331
1 × $10.00
-
×
Shield Multifuncional 9 en 1 Compatible Arduino
1 × $126.00
-
×
Fuente Conmutada 12V 3A
1 × $125.00
-
×
Batería LiPo 3.7V 40mAh 451313
1 × $36.00
-
×
Zener 9.1V 200mW SMD BZX384B9V1-E3-08
1 × $4.00
-
×
Schottky 45V 10A SMD MBRD1045T4G
1 × $15.00
-
×
Kit de Separadores de Latón M3 120 Piezas
1 × $118.00
-
×
Reprap Driver StepStick DRV8825 Controlador motor impresora 3D
1 × $47.00
-
×
Conector USB Tipo C 16p SMD TYPE-C-31-M-12
1 × $12.00
-
×
MJE15033G Transistor PNP -250V -8A TO-220C
1 × $20.00
-
×
Sonoff Cámara Seguridad WiFi Ethernet GK-200MP2-B
1 × $742.00
-
×
STM32F030F4P6 MCU Arm Cortex-M0 48MHz TSSOP-20
1 × $26.00
-
×
Inductor de Ferrita 1uH 1A SLM20121R0MIT
1 × $3.00
-
×
Ramps 1.4 Tarjeta De Control Para Impresora 3d
1 × $125.00
-
×
Arduino UNO R4 WiFi ABX00087
1 × $533.00
-
×
Amplificador De Audio TDA7297 30 Watts Kit Para Armar
2 × $48.00
-
×
Juego de 4 Pilas AAA 1.5V Alcalinas
1 × $41.00
-
×
Controlador de Velocidad 12-40V 10A Motor DC PWM
1 × $72.00
-
×
Interruptor Deslizable SPDT ON / OFF
1 × $4.00
-
×
Mini Bocina USB
1 × $127.63
-
×
Neopixel RGB 5x5mm SMD WS2812C
1 × $9.00
-
×
Mini Cargador USB Tipo-C 5V 2A
1 × $26.00
-
×
Fuente Conmutada 5V 10A
1 × $186.00
-
×
Dimmer 2000W Regulador de Voltaje AC
1 × $41.00
-
×
LED Emisor Infrarrojo SMD 0805 IR17-21C/TR8
2 × $5.00
-
×
Arduino Mega 2560 Rev3
1 × $752.00
-
×
PD/QC/AFC Señuelo de Carga Rápida
1 × $62.00
-
×
Sensor IR Rebote SMD ITR8307/S17/TR8(B)
1 × $10.00
-
×
ATMEGA8-16PU Microcontrolador DIP-28
1 × $73.00
-
×
TTA1943 Transistor PNP -230V -15A
1 × $31.00
-
×
AT25DF512C-MAHN-T IC SMD Memoria Flash
1 × $14.00
-
×
Wemos D1 WiFi ESP8266 ESP-12F compatible con Arduino
1 × $99.00
-
×
Probador de Carga USB 5V 1A 2A
1 × $28.00
-
×
ESC 30A Driver Motor Brushless
1 × $138.00
-
×
MJL21193 Transistor PNP -250V -16A TO-3PL
1 × $44.00
-
×
74HC157D,653 Multiplexor
1 × $13.00
-
×
Soldador de Gas Tipo Bolígrafo Kit de Accesorios
1 × $229.00
-
×
Kit Terminales Termorretráctiles Mezclados 250pcs
1 × $251.00
-
×
CR2032 Pila de litio tipo botón
1 × $17.00
-
×
74HC4052M/TR Multiplexor-demultiplexor
1 × $6.00
-
×
CD4013BE Flip Flop Tipo D Dual DIP-14 CMOS
1 × $7.00
-
×
PCM5100APWR IC SMD DAC
1 × $55.00
-
×
Pasta Termica Blanca Para IC Disipadores 5grs
1 × $25.00
-
×
Schottky 40V 2A SMB SS24
1 × $7.00
-
×
Perilla para potenciometro de precisión 3590S
1 × $33.00
-
×
SN74HC153DR Multiplexor
1 × $10.00
-
×
BC547B Transistor BJT NPN TO-92 45V
1 × $1.00
-
×
Speaker Altavoz 8 Ohm 1W 20mm
1 × $16.00
-
×
LED Blanco SMD 0805 NCD0805W1
1 × $3.00
-
×
2SC5198 Transistor NPN 140V 10A
1 × $21.00
-
×
Sonoff 4CH R3 Interruptor de 4 Canales
1 × $445.00
-
×
74LS165 Registro de Desplazamiento SN74LS165N
1 × $11.00
-
×
Convertidor USB Serial FTDI TTL FT232RL
1 × $57.00
-
×
Pinza Miniatura 4'' Corte Diagonal Truper 17367
1 × $79.00
-
×
MJ15025 Transistor PNP -350V -16A TO-3
1 × $45.00
-
×
ENS160 + AHT21 Sensor de Calidad del Aire CO2
1 × $248.00
-
×
Perilla para Potenciómetro Diferentes Colores
1 × $4.00
-
×
Control RGB WS2812 para ESP8266 ESP-01S
1 × $39.00
-
×
Kit de Capacitores Electrolíticos 510 Piezas 24 Valores
1 × $212.00
-
×
MJ15024G Transistor NPN 250V 16A TO-3
1 × $46.00
-
×
Antena WiFi SMA Macho 5dB
1 × $32.00
-
×
Sensor IR Rebote SMD QRE1113GR
1 × $30.00
-
×
Raspberry Pi 5 4GB
1 × $1,500.00
-
×
Resistencia de 1.5 Ohms 5% 1/4W
1 × $0.10
-
×
ESP-01S Módulo WiFi ESP8266
1 × $52.00
-
×
CD4046BE Circuito PLL Phase-Lock CMOS DIP-16
1 × $10.00
-
×
Terminal Dupont Hembra
1 × $1.00
-
×
Neopixel RGB 5.4x5mm SMD WS2813E
1 × $6.00
-
×
Inductor de Ferrita 470uH 340mA SLF0705-471KTT
1 × $5.00
-
×
NRF52840 Pro Micro Placa de Desarrollo
1 × $175.00
 Elevador de Voltaje Boost 200W 10A
Elevador de Voltaje Boost 200W 10A  Inductor de Ferrita 330uH 1.2 A 331
Inductor de Ferrita 330uH 1.2 A 331  Shield Multifuncional 9 en 1 Compatible Arduino
Shield Multifuncional 9 en 1 Compatible Arduino  Fuente Conmutada 12V 3A
Fuente Conmutada 12V 3A  Batería LiPo 3.7V 40mAh 451313
Batería LiPo 3.7V 40mAh 451313  Zener 9.1V 200mW SMD BZX384B9V1-E3-08
Zener 9.1V 200mW SMD BZX384B9V1-E3-08  Schottky 45V 10A SMD MBRD1045T4G
Schottky 45V 10A SMD MBRD1045T4G  Kit de Separadores de Latón M3 120 Piezas
Kit de Separadores de Latón M3 120 Piezas  Reprap Driver StepStick DRV8825 Controlador motor impresora 3D
Reprap Driver StepStick DRV8825 Controlador motor impresora 3D  Conector USB Tipo C 16p SMD TYPE-C-31-M-12
Conector USB Tipo C 16p SMD TYPE-C-31-M-12  MJE15033G Transistor PNP -250V -8A TO-220C
MJE15033G Transistor PNP -250V -8A TO-220C  Sonoff Cámara Seguridad WiFi Ethernet GK-200MP2-B
Sonoff Cámara Seguridad WiFi Ethernet GK-200MP2-B  STM32F030F4P6 MCU Arm Cortex-M0 48MHz TSSOP-20
STM32F030F4P6 MCU Arm Cortex-M0 48MHz TSSOP-20  Inductor de Ferrita 1uH 1A SLM20121R0MIT
Inductor de Ferrita 1uH 1A SLM20121R0MIT  Ramps 1.4 Tarjeta De Control Para Impresora 3d
Ramps 1.4 Tarjeta De Control Para Impresora 3d  Arduino UNO R4 WiFi ABX00087
Arduino UNO R4 WiFi ABX00087  Amplificador De Audio TDA7297 30 Watts Kit Para Armar
Amplificador De Audio TDA7297 30 Watts Kit Para Armar  Juego de 4 Pilas AAA 1.5V Alcalinas
Juego de 4 Pilas AAA 1.5V Alcalinas  Controlador de Velocidad 12-40V 10A Motor DC PWM
Controlador de Velocidad 12-40V 10A Motor DC PWM  Interruptor Deslizable SPDT ON / OFF
Interruptor Deslizable SPDT ON / OFF  Mini Bocina USB
Mini Bocina USB  Mini Cargador USB Tipo-C 5V 2A
Mini Cargador USB Tipo-C 5V 2A  Fuente Conmutada 5V 10A
Fuente Conmutada 5V 10A  Dimmer 2000W Regulador de Voltaje AC
Dimmer 2000W Regulador de Voltaje AC  LED Emisor Infrarrojo SMD 0805 IR17-21C/TR8
LED Emisor Infrarrojo SMD 0805 IR17-21C/TR8  Arduino Mega 2560 Rev3
Arduino Mega 2560 Rev3  PD/QC/AFC Señuelo de Carga Rápida
PD/QC/AFC Señuelo de Carga Rápida  Sensor IR Rebote SMD ITR8307/S17/TR8(B)
Sensor IR Rebote SMD ITR8307/S17/TR8(B)  ATMEGA8-16PU Microcontrolador DIP-28
ATMEGA8-16PU Microcontrolador DIP-28  TTA1943 Transistor PNP -230V -15A
TTA1943 Transistor PNP -230V -15A  AT25DF512C-MAHN-T IC SMD Memoria Flash
AT25DF512C-MAHN-T IC SMD Memoria Flash  Wemos D1 WiFi ESP8266 ESP-12F compatible con Arduino
Wemos D1 WiFi ESP8266 ESP-12F compatible con Arduino  Probador de Carga USB 5V 1A 2A
Probador de Carga USB 5V 1A 2A  ESC 30A Driver Motor Brushless
ESC 30A Driver Motor Brushless  MJL21193 Transistor PNP -250V -16A TO-3PL
MJL21193 Transistor PNP -250V -16A TO-3PL  74HC157D,653 Multiplexor
74HC157D,653 Multiplexor  Soldador de Gas Tipo Bolígrafo Kit de Accesorios
Soldador de Gas Tipo Bolígrafo Kit de Accesorios  Kit Terminales Termorretráctiles Mezclados 250pcs
Kit Terminales Termorretráctiles Mezclados 250pcs  CR2032 Pila de litio tipo botón
CR2032 Pila de litio tipo botón  74HC4052M/TR Multiplexor-demultiplexor
74HC4052M/TR Multiplexor-demultiplexor  CD4013BE Flip Flop Tipo D Dual DIP-14 CMOS
CD4013BE Flip Flop Tipo D Dual DIP-14 CMOS  PCM5100APWR IC SMD DAC
PCM5100APWR IC SMD DAC  Pasta Termica Blanca Para IC Disipadores 5grs
Pasta Termica Blanca Para IC Disipadores 5grs  Schottky 40V 2A SMB SS24
Schottky 40V 2A SMB SS24  Perilla para potenciometro de precisión 3590S
Perilla para potenciometro de precisión 3590S  SN74HC153DR Multiplexor
SN74HC153DR Multiplexor  BC547B Transistor BJT NPN TO-92 45V
BC547B Transistor BJT NPN TO-92 45V  Speaker Altavoz 8 Ohm 1W 20mm
Speaker Altavoz 8 Ohm 1W 20mm  LED Blanco SMD 0805 NCD0805W1
LED Blanco SMD 0805 NCD0805W1  2SC5198 Transistor NPN 140V 10A
2SC5198 Transistor NPN 140V 10A  Sonoff 4CH R3 Interruptor de 4 Canales
Sonoff 4CH R3 Interruptor de 4 Canales  74LS165 Registro de Desplazamiento SN74LS165N
74LS165 Registro de Desplazamiento SN74LS165N  Convertidor USB Serial FTDI TTL FT232RL
Convertidor USB Serial FTDI TTL FT232RL  Pinza Miniatura 4'' Corte Diagonal Truper 17367
Pinza Miniatura 4'' Corte Diagonal Truper 17367  MJ15025 Transistor PNP -350V -16A TO-3
MJ15025 Transistor PNP -350V -16A TO-3  ENS160 + AHT21 Sensor de Calidad del Aire CO2
ENS160 + AHT21 Sensor de Calidad del Aire CO2  Perilla para Potenciómetro Diferentes Colores
Perilla para Potenciómetro Diferentes Colores  Control RGB WS2812 para ESP8266 ESP-01S
Control RGB WS2812 para ESP8266 ESP-01S  Kit de Capacitores Electrolíticos 510 Piezas 24 Valores
Kit de Capacitores Electrolíticos 510 Piezas 24 Valores  MJ15024G Transistor NPN 250V 16A TO-3
MJ15024G Transistor NPN 250V 16A TO-3  Antena WiFi SMA Macho 5dB
Antena WiFi SMA Macho 5dB  Sensor IR Rebote SMD QRE1113GR
Sensor IR Rebote SMD QRE1113GR  Raspberry Pi 5 4GB
Raspberry Pi 5 4GB  Resistencia de 1.5 Ohms 5% 1/4W
Resistencia de 1.5 Ohms 5% 1/4W  ESP-01S Módulo WiFi ESP8266
ESP-01S Módulo WiFi ESP8266  CD4046BE Circuito PLL Phase-Lock CMOS DIP-16
CD4046BE Circuito PLL Phase-Lock CMOS DIP-16  Terminal Dupont Hembra
Terminal Dupont Hembra  Inductor de Ferrita 470uH 340mA SLF0705-471KTT
Inductor de Ferrita 470uH 340mA SLF0705-471KTT  NRF52840 Pro Micro Placa de Desarrollo
NRF52840 Pro Micro Placa de Desarrollo 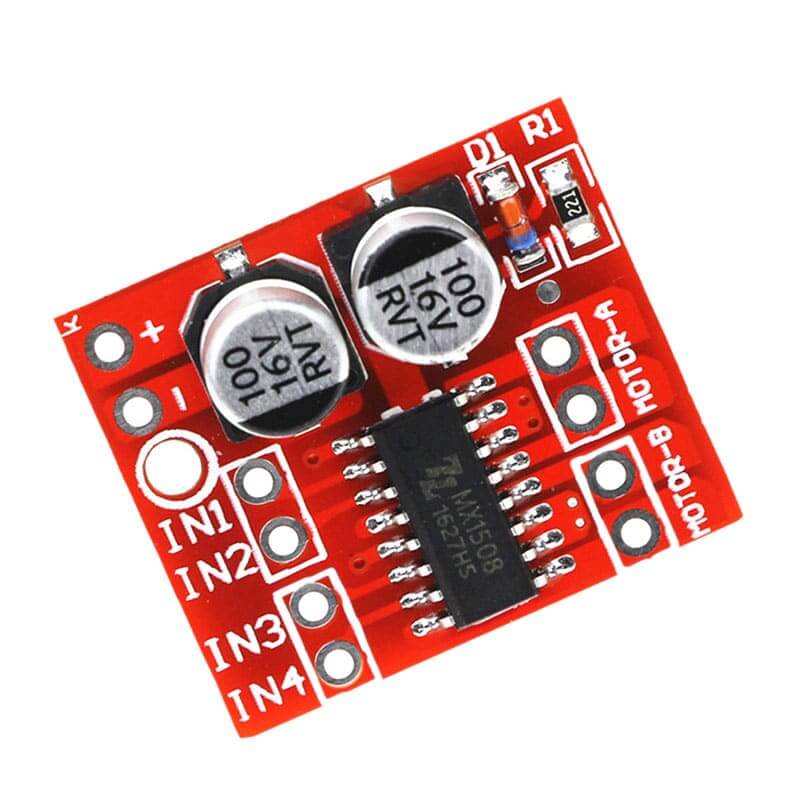





Doble Puente H Mx1508
$17.00
9 disponibles
Leer más


¡Compra ahora y paga después en meses sin tarjeta!
100% online, sin bancos ni costo de mantenimiento
¿Cómo funciona?
1
Al pagar elegí Mercado Pago. Podrás ingresar con tu cuenta o crear una en pocos pasos.
2
Busca Mercado Crédito entre las opciones, selecciónalo y elegí en cuántas cuotas quieres pagar.
3
Pagá mes a mes tus cuotas como prefieras, desde la app de Mercado Pago.
¿Dudas? Consulta nuestra FAQ . Crédito sujeto a aprobación.
Total del producto: 17.0
INFORMACIÓN
¿Qué es el Doble puente H? Es un modulo diminuto que esta construido por un circuito integrado MX1508, capacitores electrolíticos de aluminio – SMD, resistencia y un diodo. Su diseño esta basado en los transistores MOSFETS, una de sus ventajas es que genera una mínima cantidad de calor ademas de una menor caída de voltaje a la salida de los motores, otra ventaja es que su pequeño tamaño y peso lo hacen ideal para el diseño de juguetes y para la robótica móvil.
¿Para qué sirve? El MX1508 es un chip básico que puede controlar independientemente el sentido de giro de cada uno de los dos motores que maneja. Puede suministrar continuamente 1.5 Amp y picos de 2.0 Amp.
¿Cómo funciona? Con ayuda de una placa de desarrollo y con esta placa puedes manipular el sentido de giro de al menos dos motores de CD. En términos simples lo que debes es alimentar a los motores y utilizar instrucciones de programación para controlar el sentido de giro en ambos motores.
ESPECIFICACIONES TÉCNICAS Y CARACTERÍSTICAS
- Voltaje de entrada (motores): 2 to 9.6 Volts
- Voltaje de entrada (señales lógicas): 1.8 to 5 Volts
- Corriente DC por canal: 1.5 Amp
- Corriente pico máxima: 2.0 Amp
- Protección contra sobre carga térmica
- Control de motores paso a paso en modo unipolar o bipolar
- Dimensiones: 21 x 25 x 1.5 mm
- Peso: 5 gr
TUTORIALES
DOCUMENTACIÓN Y RECURSOS
INFORMACIÓN ADICIONAL
¿Cómo conectar MX1508?
Lo primero que debemos considerar es que los pines (+) y (-) son para la alimentación de los motores. Es recomendable soldar header macho para poder tener limpieza y estética en la hora de realizar las conexiones.
¿Cuáles son los pines para conectar los motores?
Los pines para el (Motor-A) deberán ir conectados a los bornes del primer motor así como los pines del (Motor-B) para el segundo motor.
¿Cuáles son los pines para controlar el sentido de giro?
El sentido de giro del primer motor A, sera controlado por el pin IN1 y por el pin IN2, ambos pines deben estar conectados a las salidas digitales del arduino. Si queremos que el motor gire en un sentido debemos poner en estado alto el pin IN1 y en estado bajo IN2. Para que el motor realice lo contrario, el pin IN1 en estado bajo y IN2 en estado alto. Sucede lo mismo si quieres manipular el sentido de giro para el motor B.
¿Cuáles son las placas de desarrollo qué puedo utilizar?
Desde la placa de Arduino UNO, MEGA y Nano. Recuerda que todo dependerá de la implementación que tu quieras realizar a tu proyecto.
AR0398
| Peso | 0.003 kg |
|---|
Solo los usuarios registrados que hayan comprado este producto pueden hacer una valoración.
También te recomendamos…

General
$13.00
Valoraciones
No hay valoraciones aún.