




INFORMACIÓN
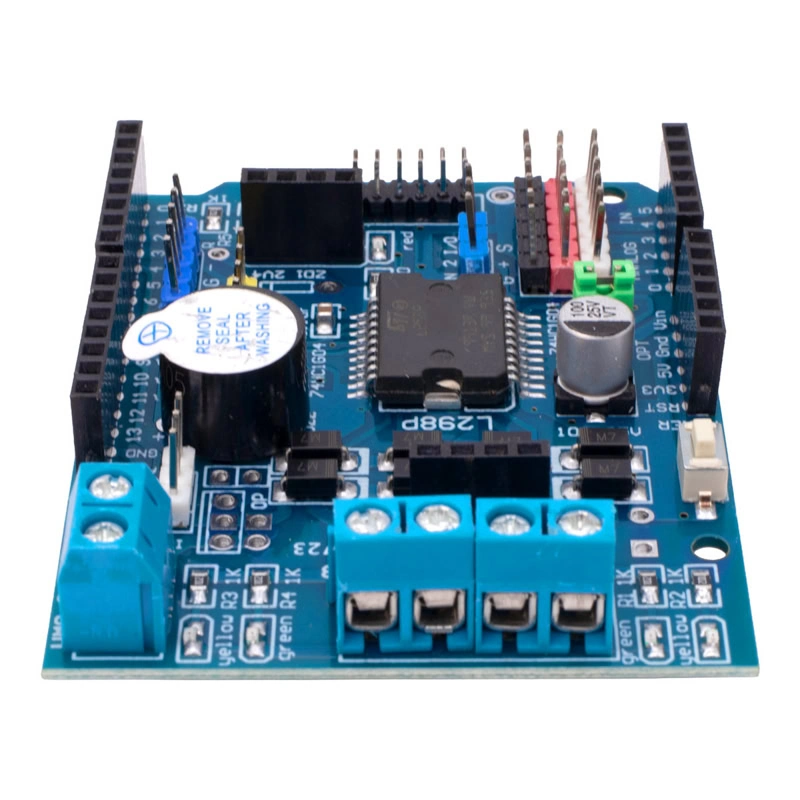
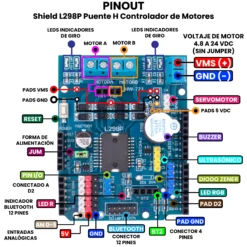
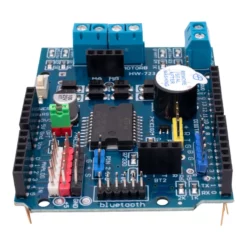
La Shield L298P Puente H Controlador de Motores con GPIO es una placa de expansión para Arduino basada en el chip L298P, diseñada para facilitar el control de dos motores DC con control de velocidad (PWM), dirección, arranque y paro. Esta shield no solo incorpora el circuito dual full H-bridge, sino que también extiende muchos pines GPIO, para conectar fácilmente sensores o módulos sin usar cables sueltos, incluye conectores para módulos Bluetooth (HC-05/HC-06), un zumbador (buzzer), entrada para sensor ultrasónico HC-SR04, un conector para LED RGB y un botón de reset adicional. Además, ofrece opciones de alimentación flexibles (alimentación separada para motores y lógica, con jumper opcional para alimentar el Arduino desde la shield).
La Shield L298P Puente H se usa para controlar motores DC, por lo que es muy común en robots móviles, carros seguidores de línea, brazos robóticos y sistemas automatizados. Gracias a sus pines GPIO extra, también facilita conectar sensores, módulos Bluetooth y ultrasonido sin mucho cableado. Es compatible principalmente con Arduino Uno R3 y placas compatibles de 5 V, y puede adaptarse a otras tarjetas tipo Arduino con la misma distribución de pines.
ESPECIFICACIONES Y CARACTERÍSTICAS
- Driver: L298P (doble puente H).
- Motores Soportados: 2 motores DC.
- Voltajes:
- Rango de Voltaje de Motor: ~4.8 a 24 VDC.
- Voltaje de Entrada: 6.5 a 12 VDC.
- Lógica: 5 VDC.
- Corrientes
- Por canal: Hasta ~2 A (máximo por L298P).
- Corriente de GPIO: < 36 mA.
- Disipación Máxima de Potencia: 25 W.
- Control de velocidad: PWM.
- Control de dirección: Sí (sentido CW/CCW).
- Protección: Diodos de protección integrados.
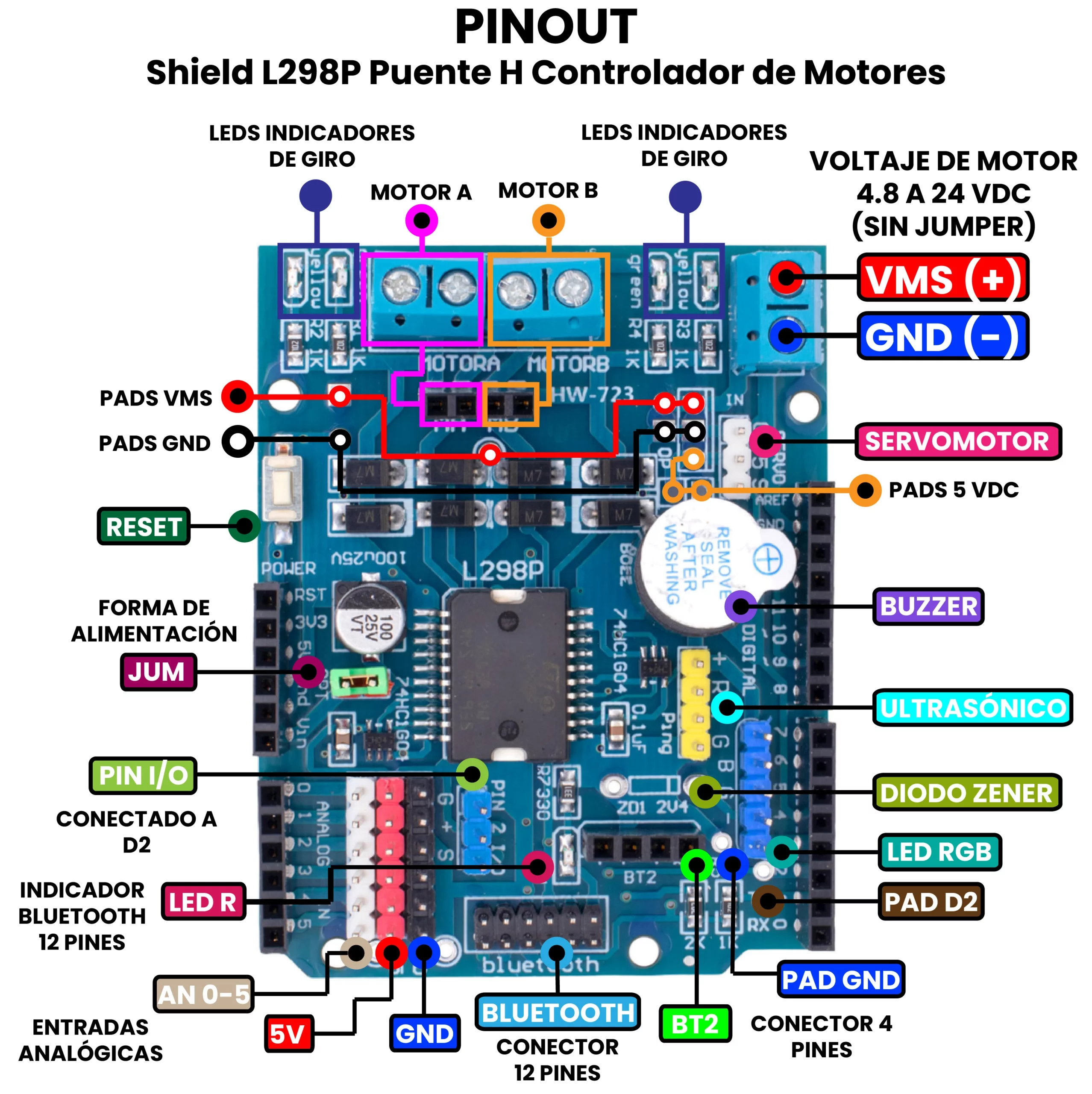
- Pines Añadidos:
- Conectores para Módulos Bluetooth.
- Conector para Sensor Ultrasónico.
- Pines para LED RGB.
- Buzzer Integrado.
- Pines para Servomotor.
- Pines para Sensor (D2).
- Pines Analógicos.
- Pines 5VDC – GND.
- LEDS Indicadores de Giro.
- Entrada de alimentación separada para motores (seleccionable con jumper).
- Temperatura de trabajo: -25 °C + 130 °C.
- Dimensiones: 68 mm x 53 mm x 20 mm.
- Peso: 26 g.
DOCUMENTACIÓN Y RECURSOS
INFORMACIÓN ADICIONAL
Funciones de la Shield L298P Puente H Controlador de Motores.
- Control de Motor Dual: Capaz de accionar dos motores cepillados simultáneamente con control de velocidad, dirección, arranque y parada.
- Compatibilidad Versátil: Puede controlar motores paso a paso tanto bipolares como unipolares con sus circuitos de puente H completo dual.
- Pines ADC Extendidos: Los pines ADC de la placa principal Arduino se extienden a los encabezados SVG (tierra de voltaje de señal), lo que simplifica las conexiones del módulo sensor con pines GND y 5V.
- Compatibilidad con Bluetooth: Equipado con conectores para módulos Bluetooth HC05 o HC06, lo que garantiza una comunicación inalámbrica flexible.
Sistema de Alimentación Lógica.
- Alimentación Lógica de 5 V:
- Disponible en seis conjuntos de pines de sensor rojo de 5 V (SVG) para pines analógicos.
- Conector de pin amarillo para telémetros ultrasónicos.
- Dos conectores digitales azules.
- Alimenta la parte lógica del chip L298P independientemente de la actividad del motor, lo que garantiza un funcionamiento limpio y estable.
- Alimentación lógica de 3.3 V:
- Disponible en los dos conectores Bluetooth.
Opciones de Alimentación.
- Alimentación independiente para Arduino: La placa principal Arduino se puede alimentar a través de su conector de alimentación USB o CC.
- Alimentación desde el Shield: El shield puede alimentar el Arduino a través de su conector de alimentación VMS del motor:
- Configuración del Jumper:
- Puente instalado: Conecta la entrada de alimentación del motor (6.5 VDC a menos de 12 VDC) al pin VIN de Arduino, alimentando el regulador de 5 V integrado.
- Puente eliminado: Requiere alimentación independiente para Arduino, lo que evita conflictos de suministro eléctrico. (No se debe usar el conector de CC del Arduino).
- Configuración del Jumper:
Alimentación del Motor.
La alimentación del motor entra por el terminal de tornillo de 2 pines. El VMS es el voltaje positivo del motor, que puede oscilar entre 4.8 y 24 V CC. Si utiliza esta entrada para alimentar el Arduino instalando el puente “OPT”, el voltaje de entrada máximo en este terminal debe limitarse a 12 V para evitar el sobrecalentamiento del regulador del Arduino
- VMS: VCC del motor que debe estar entre 4.8 y 24 VDC.
- GND: Tierra del Motor.
Esta alimentación del motor se alimenta a un regulador de 5 V montado en la parte inferior del protector. Estos 5 V alimentan el conector blanco del servo (cerca del zumbador). Esto evita que cualquier ruido eléctrico del servo se transmita a los 5 V principales que alimentan la lógica. Para que este regulador de 5 V funcione, el voltaje del VMS debe ser de al menos 6.3 V y estar limitado a un máximo de 12 V CC para evitar que se caliente.
Nota: Si tiene el puente OPT instalado y el USB conectado, pero no hay alimentación en el conector del motor VMS, intentará usar la alimentación USB para alimentar los motores de CC. Esto debe evitarse.
Si tiene el puente OPT instalado y la alimentación llega a la toma de CC del Arduino, funcionará, pero el ruido del motor de CC se acoplará a la fuente de alimentación lógica de 5 V y podría causar un comportamiento erróneo, por lo que no se recomienda. En general, si utiliza los motores, debería planificar alimentarlos a través del conector de alimentación VMS para un funcionamiento más estable.
Funcionamiento de Motores.
El L298P contiene dos canales de accionamiento de puente H completos que proporcionan control total de velocidad y dirección. Los 2 canales de accionamiento del motor de CC pueden funcionar a voltajes de 4.8 a 24 V y a corrientes de hasta 2 A (pico) y 1 A continuo por canal. También se pueden compartir dos motores con un canal de accionamiento, siempre que la corriente combinada se mantenga dentro de los 2 A y no le importe que giren en la misma dirección y velocidad.
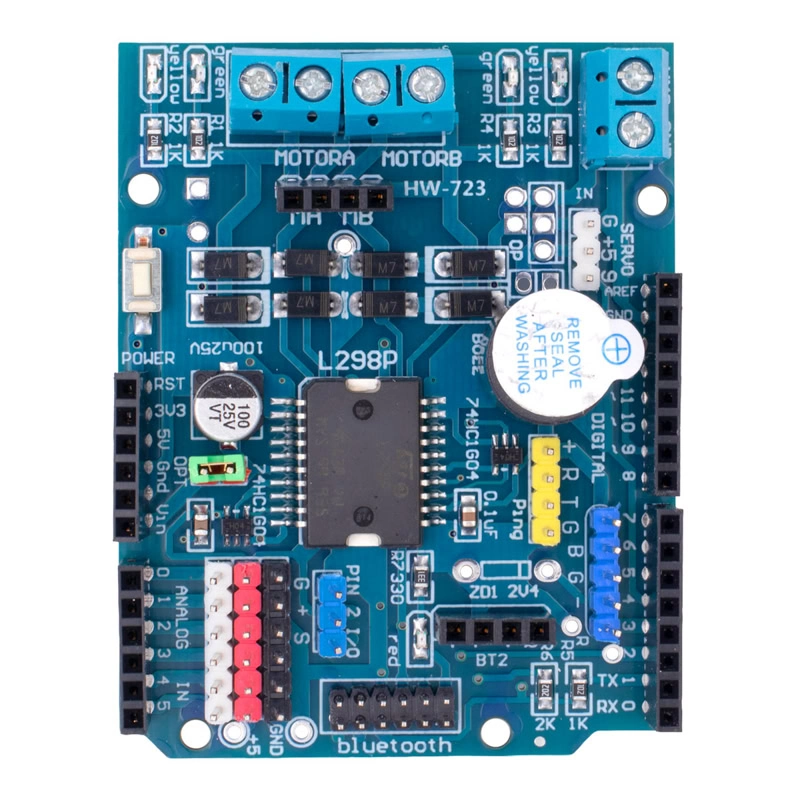
El controlador de motor L298P utiliza los pines D10, D11, D12 y D13 de Arduino para el control del motor. Los pines 10 y 11 son pines PWM y se conectan a los pines EN del chip para controlar la velocidad mediante la modulación de la entrada de habilitación. D10 controla la velocidad del motor A y D11 la del motor B. Los pines 12 y 13 están conectados a las entradas IN para controlar la dirección. El pin 12 controla la dirección del motor A y el pin 13 la del motor B.
Normalmente, se utilizan dos pines para determinar la dirección de rotación de cada motor, pero esta shield cuenta con un inversor que proporciona una versión invertida de la señal a ambos pines. Esto reduce el número de pines utilizados en el Arduino, pero elimina la posibilidad de realizar frenado dinámico, lo cual no suele ser un problema en la mayoría de los proyectos. Reducir los pines de control de velocidad a un valor PWM de cero permitirá detener el sistema.
Conexiones de Motores.
Las conexiones del motor se realizan a través de un bloque de terminales de tornillo de 4 vías con 2 terminales para cada motor que están etiquetados como MOTORA y MOTORB. Los pines +/- de cada motor no están etiquetados, por lo que su cableado es algo arbitrario y depende de lo que se considere funcionamiento del motor en sentido directo o inverso. Básicamente, si el motor gira en la dirección opuesta a la esperada, simplemente invierta el cableado de ese motor.
Estos puntos de conexión del motor también se reflejan en un conector hembra de 4 pines para brindar un poco más de flexibilidad. Estos cables de control del motor también tienen LEDs amarillos y verdes. Su brillo varía según la intensidad de la señal PWM.
Conexión del Servomotor.
Los servomotores requieren 5 V, tierra y una señal PWM para fijar su posición. El shield utiliza D9 para la señal PWM. Una característica interesante de estos módulos es que cuentan con un regulador de 5 V dedicado para alimentar el servo y evitar que el ruido eléctrico se refleje en la alimentación lógica principal de 5 V. Para utilizar el servo, necesitará tener un mínimo de 6.5 VCC en el conector de alimentación del motor principal para que el regulador funcione. Si no está utilizando un servo, D9 así como este 5V dedicado están disponibles para otros usos.
Conexiones de Pines.
Todas las E/S se conectan a conectores hembra apilables en el shield, excepto el IOREF, y los dos pines I2C están conectados al conector USB, lo que permite la conexión de un shield secundario, siempre que no entre en conflicto con los pines en uso. Además, muchos de estos pines están conectados a otros conectores para facilitar la conexión.
Conexión Bluetooth.
Hay dos conectores Bluetooth en la placa. El primer conector es un cabezal de 4 pines que proporciona alimentación de 3.3 V, tierra, TX y RX. Este tipo de conector es compatible con los módulos Bluetooth HC05 o HC06. El pin de recepción tiene un divisor de voltaje de 1K/2K para nivelar la salida TX del Arduino para que sea compatible con 3.3 V, lo cual es una característica interesante.
1 conector hembra Bluetooth BT2 de 4 pines (negro):
- +: 3.3 V.
- -: Tierra.
- T: D0 (RX).
- R: D1 (TX).
El otro conector Bluetooth es un conector macho de 12 pines. Los cables TX, RX de 5 V y tierra se conectan a este conector. Los únicos conectores Bluetooth de 12 pines se suelen usar en automóviles.
Conexión Ultrasónico.
Una interfaz robótica común son los telémetros ultrasónicos como el HC-SR04. Estos funcionan enviando un ping de sonido ultrasónico y cronometrando el tiempo que tarda en volver. La placa tiene un conector de 4 pines dedicado para conectar el sensor.
1 x 4 conectores macho Ping (amarillo):
- +: 5 V.
- R: Echo (D8).
- T: Trigger (D7).
- G: Tierra.
Salidas Analógicas/Digitales.
Un problema común al conectar sensores a un Arduino es que muchos requieren conexiones de tierra/VCC, además de una entrada analógica o E/S digital. Esta placa conecta los pines A0 – A5 a una fila de conectores que también proporcionan puntos de alimentación y tierra separados para cada pin A0 – A5, en formato SVG. Los conectores blancos son las líneas de señal, los rojos proporcionan 5 V y los negros, la tierra.
Los pines A0-A5 se pueden usar para entradas analógicas o como E/S digitales, por lo que se pueden admitir ambos tipos de sensores. Conector 3 x 6 (blanco/rojo/negro):
- A0 / 5 V / Tierra.
- A1 / 5 V / Tierra.
- A2 / 5V / Tierra.
- A3 / 5V / Tierra.
- A4 / 5V / Tierra.
- A5 / 5V / Tierra.
También hay un conector azul de 3 pines que genera 5 V, tierra y D2 que se puede usar para un sensor digital u otra conexión remota. Conector 1 x 3 (azul):
- G: Tierra.
- +: 5 V.
- S: D2 – E/S digital.
Conexiones del LED RGB.
Y por si fuera poco, hay un conector de 5 pines que conecta D3, D5, D6, 5 V y tierra. Esto coloca 3 salidas PWM junto con alimentación y tierra en un solo conector, lo que puede ser útil para varias cosas, como controlar un LED RGB. Se admite el tipo de cátodo o ánodo común. Si quieres usar la tierra del conector es necesario soldar un diodo zener de 2.4V de lo contrario se puede usar cualquier tierra del shield. Conector de 1 x 5 pines (azul):
- ‘ ‘: 5 V Este pin no está marcado, pero se encuentra junto a D7.
- B: D6 B podría usarse para azul en LED RGB.
- G D5 G podría usarse para verde en LED RGB.
- -: Tierra (NO CONECTADO).
- R: D3 R podría usarse para rojo en el LED RGB.
Pin del Zumbador.
El zumbador está conectado a D4. Está activo en ALTO.
Interruptor de Reinicio.
El protector tiene un botón de reinicio adicional para facilitar el acceso.
ENLACES EXTERNOS
| Peso | 0.028 kg |
|---|---|
| Dimensiones | 12 × 2.5 × 15 cm |
| TIPO DE SHIELD: | MOTORES |
| FORMATO: | UNO |
Solo los usuarios registrados que hayan comprado este producto pueden hacer una valoración.
También te recomendamos…










Productos relacionados







Valoraciones
No hay valoraciones aún.